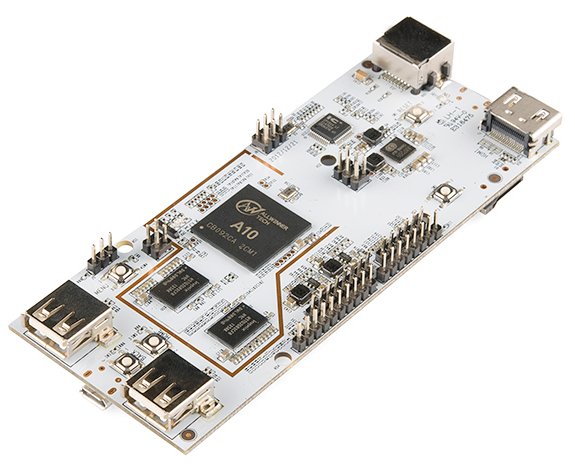
Сайт производителя pcDuino
Dimensions: 125mm X 52mm
Features:
- 1GHz ARM Cortex A8 CPU
- GPU: OpenGL ES2.0, OpenVG 1.1 Mali 400 core
- 1GB DRAM
- Onboard Storage: 2GB Flash, microSD card (TF) slot for up to 32GB
- Arduino-Style Peripheral Headers (Adapter Needed for Shield Form-Factor)
- HDMI Video Output
- Linux3.0 + Ubuntu12.10 Supported
- 0.1″ Spaced GPIO Headers
- RJ45 Ethernet Connection
- Power Requirements: 2A @ 5VDC
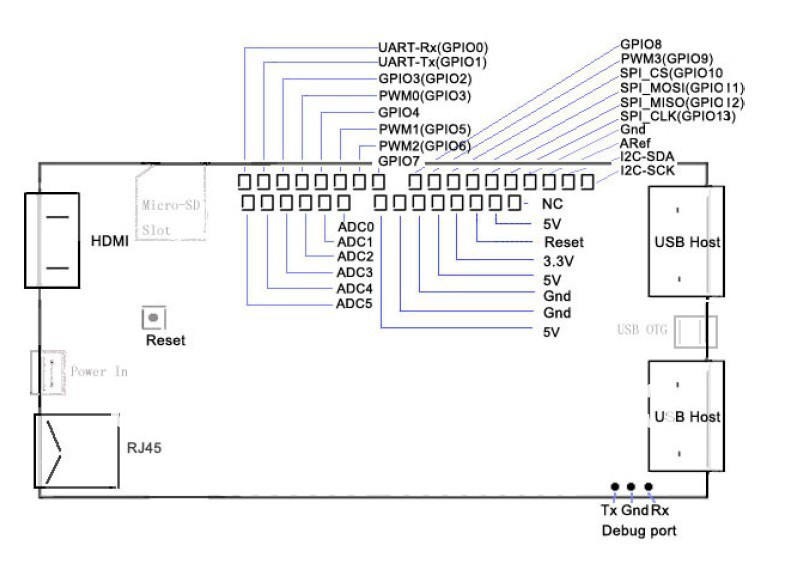
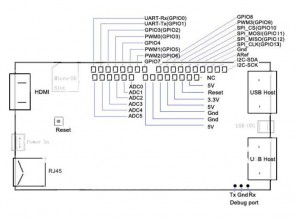
- API to access the following interfaces:
- UART
- ADC
- PWM
- GPIO
- I2C
- SPI
- Program in C, C++ with GNU tool chain
- Program in Java with standard Android SDK
Купить: SparkFun
Работаем с I2C
Для начала установим следующие пакеты:
sudo apt-get install i2c-tools
sudo apt-get install python-smbus
root@ubuntu:# i2cdetect -y 2
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- 1d -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
Для доступа из С/C++ не забываем сделать:
roto# modprobe gpio
root# modprobe pwm
root# modprobe adc
Доступ к UART (GPI0 and GPI1) из Python
#!/usr/bin/python
import serial
## Select and configure the port
arduino = serial.Serial('/dev/ttyS1',baudrate=115200,timeout=10)
arduino.write("Arduino, Hello")
## Close the port so other applications can use it.
arduino.close()