Месяц: Февраль 2013
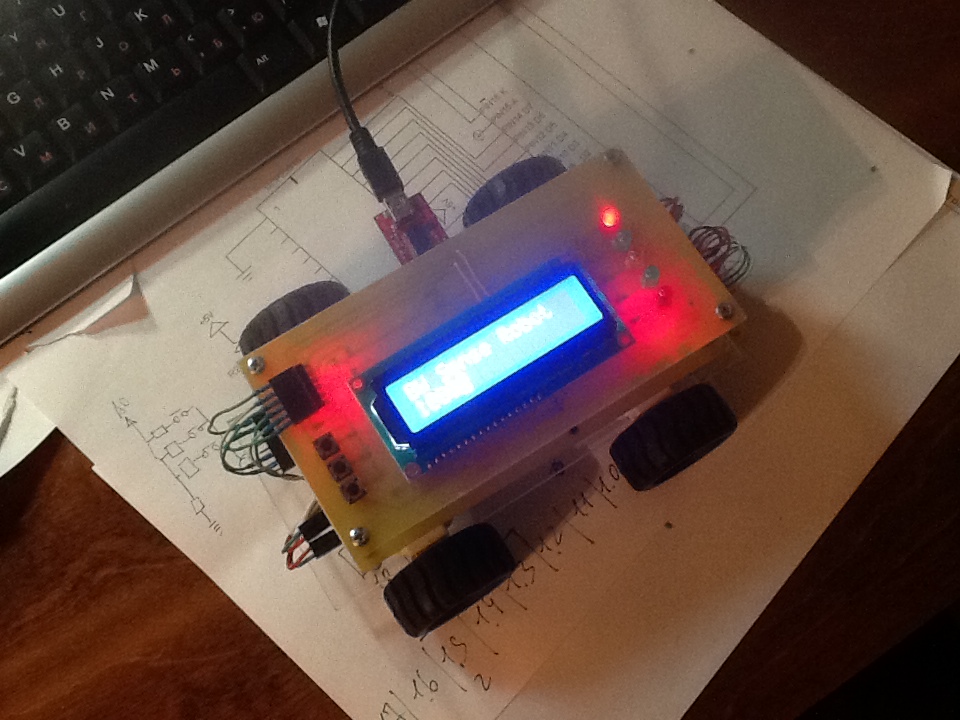
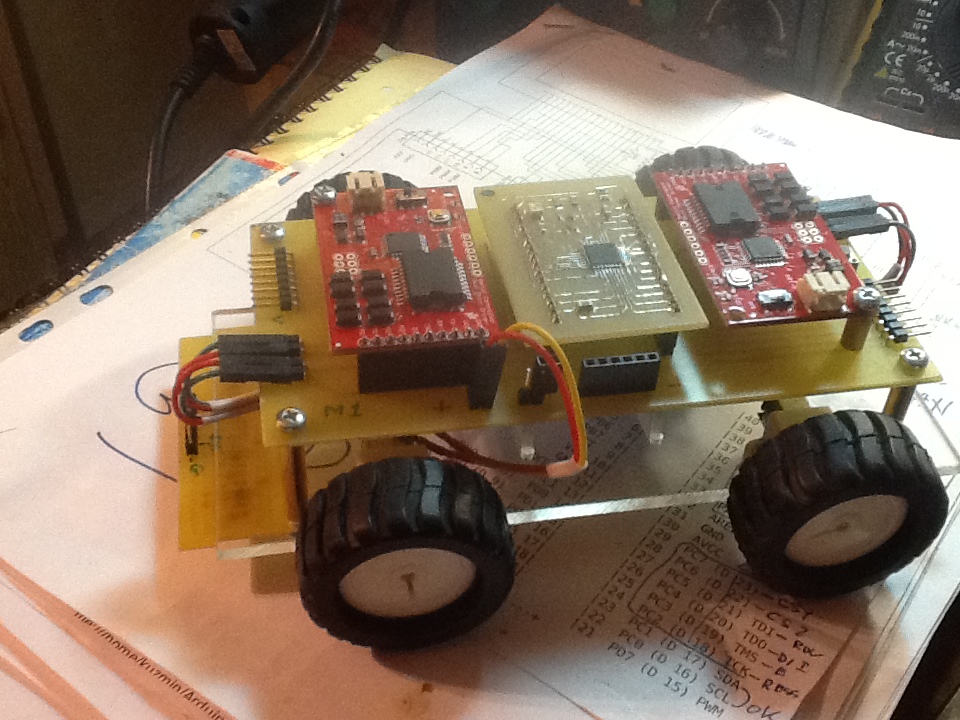
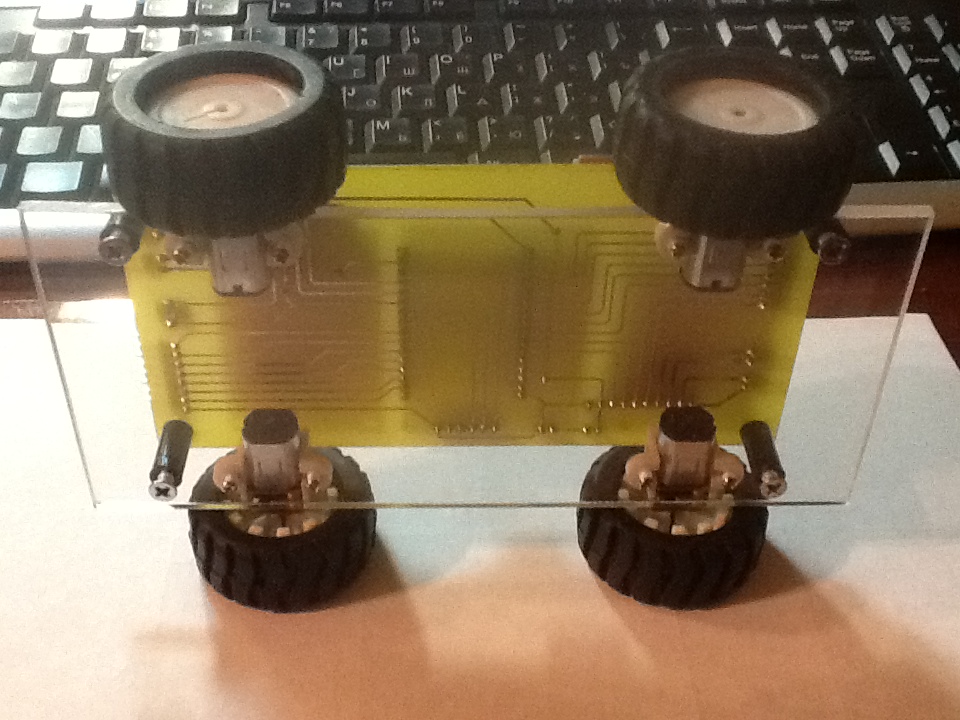
Продолжаем наращивать BW-Робота
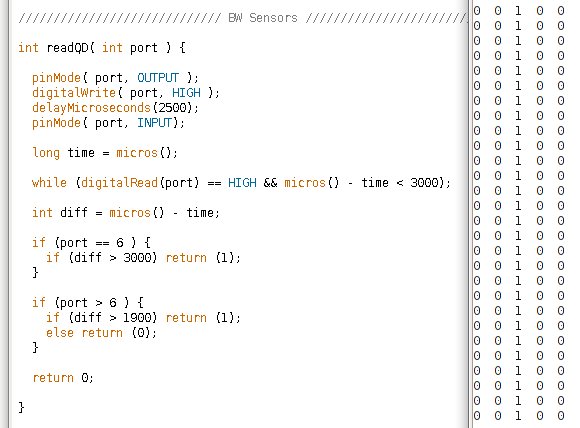
Подключили Back/White сенсоры.
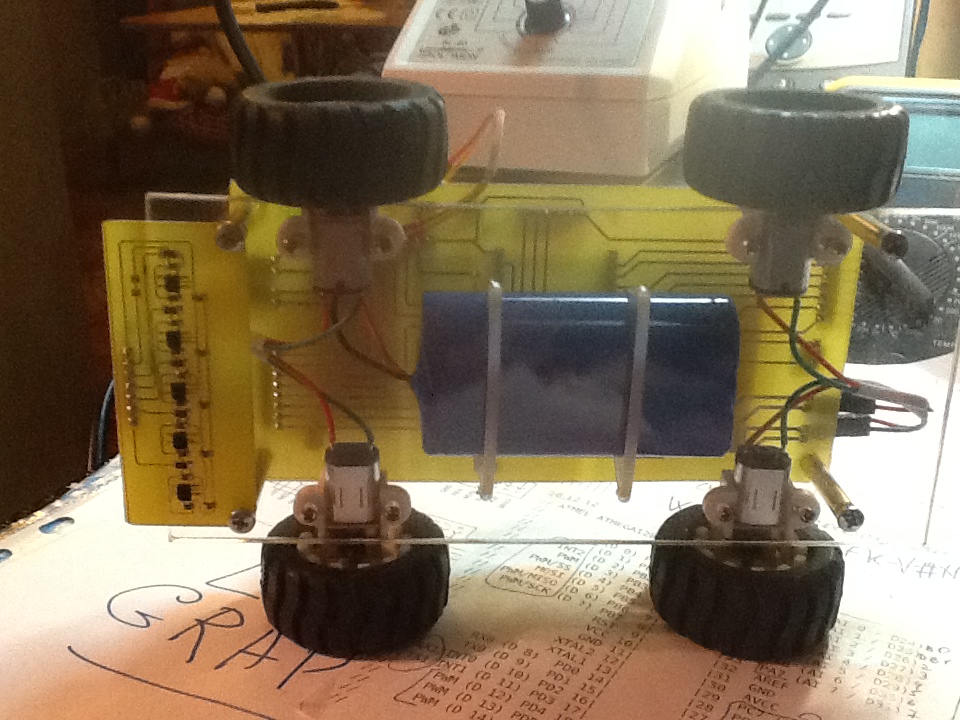
Пример кода для Arduino 1.0.3, один из датчиков работает очень как то странно, еще пока не разобрался почему.
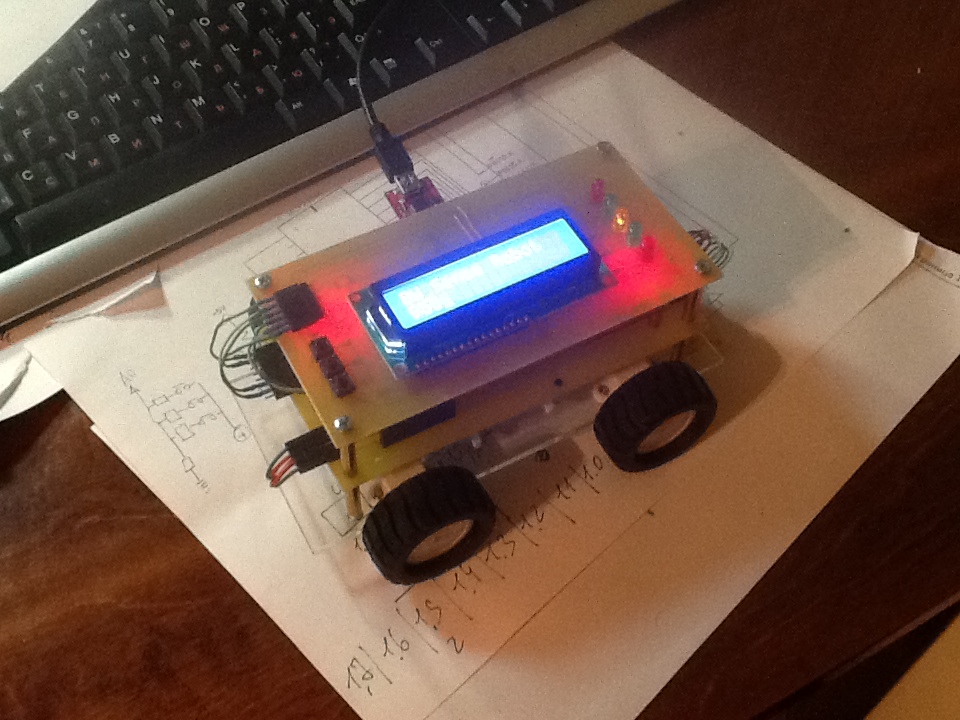
BW-Robot – Тестируем
Поворачивает практически на любой поверхности.
#include <SoftwareSerial.h>
#define Turn_on_off 2
#define LED 5
SoftwareSerial r_motor(4,3); // Передние моторы - ВСЕ РАБОТАЕТ
SoftwareSerial f_motor(13,12); // Задние моторы - ВСЕ РАБОТАЕТ
boolean prog_stat = false;
int pd2 = 0;
void setup()
{
pinMode(LED,OUTPUT);
f_motor.begin(115200);
r_motor.begin(115200);
stop_all();
digitalWrite(LED,HIGH); // Test
delay(300);
digitalWrite(LED,LOW);
}
/////////////////////////////////// Main Loop ///////////////////////
void loop()
{
pd2 = digitalRead(Turn_on_off);
if (pd2 == 1) {
delay(10);
while(digitalRead(Turn_on_off) == HIGH) delay(10);
prog_stat =! prog_stat;
if (prog_stat == true) {
digitalWrite(LED,HIGH);
forward(9,3000);
revers(9,3000);
stop_all();
left(9,4000); // 360
right(9,4000); // 360
stop_all();
digitalWrite(LED,LOW);
}
else {
digitalWrite(LED,LOW);
stop_all();
}
}
}
/////////////////////// Stop All //////////////////////
void stop_all( void ) {
f_motor.print("1F0\r");
delay(10);
f_motor.print("2F0\r");
delay(10);
r_motor.print("1F0\r");
delay(10);
r_motor.print("2F0\r");
delay(10);
}
//////////////////// Forward /////////////////////////
void forward( int speed, int wait ) {
f_motor.print("2F6\r");
delay(10);
f_motor.print("1F6\r");
delay(10);
r_motor.print("2F6\r");
delay(10);
r_motor.print("1F6\r");
delay(10);
delay(wait);
}
//////////////////// Revers //////////////////////
void revers( int speed, int wait ) {
f_motor.print("2R6\r");
delay(10);
f_motor.print("1R6\r");
delay(10);
r_motor.print("2R6\r");
delay(10);
r_motor.print("1R6\r");
delay(10);
delay(wait);
}
//////////////////// Left //////////////////////
void left( int speed, int wait ) {
f_motor.print("2F6\r");
delay(10);
f_motor.print("1R6\r");
delay(10);
r_motor.print("2R6\r");
delay(10);
r_motor.print("1F6\r");
delay(10);
delay(wait);
}
//////////////////// Right //////////////////////
void right( int speed, int wait ) {
f_motor.print("2R6\r");
delay(10);
f_motor.print("1F6\r");
delay(10);
r_motor.print("2F6\r");
delay(10);
r_motor.print("1R6\r");
delay(10);
delay(wait);
}
#define Turn_on_off 2
#define LED 5
SoftwareSerial r_motor(4,3); // Передние моторы - ВСЕ РАБОТАЕТ
SoftwareSerial f_motor(13,12); // Задние моторы - ВСЕ РАБОТАЕТ
boolean prog_stat = false;
int pd2 = 0;
void setup()
{
pinMode(LED,OUTPUT);
f_motor.begin(115200);
r_motor.begin(115200);
stop_all();
digitalWrite(LED,HIGH); // Test
delay(300);
digitalWrite(LED,LOW);
}
/////////////////////////////////// Main Loop ///////////////////////
void loop()
{
pd2 = digitalRead(Turn_on_off);
if (pd2 == 1) {
delay(10);
while(digitalRead(Turn_on_off) == HIGH) delay(10);
prog_stat =! prog_stat;
if (prog_stat == true) {
digitalWrite(LED,HIGH);
forward(9,3000);
revers(9,3000);
stop_all();
left(9,4000); // 360
right(9,4000); // 360
stop_all();
digitalWrite(LED,LOW);
}
else {
digitalWrite(LED,LOW);
stop_all();
}
}
}
/////////////////////// Stop All //////////////////////
void stop_all( void ) {
f_motor.print("1F0\r");
delay(10);
f_motor.print("2F0\r");
delay(10);
r_motor.print("1F0\r");
delay(10);
r_motor.print("2F0\r");
delay(10);
}
//////////////////// Forward /////////////////////////
void forward( int speed, int wait ) {
f_motor.print("2F6\r");
delay(10);
f_motor.print("1F6\r");
delay(10);
r_motor.print("2F6\r");
delay(10);
r_motor.print("1F6\r");
delay(10);
delay(wait);
}
//////////////////// Revers //////////////////////
void revers( int speed, int wait ) {
f_motor.print("2R6\r");
delay(10);
f_motor.print("1R6\r");
delay(10);
r_motor.print("2R6\r");
delay(10);
r_motor.print("1R6\r");
delay(10);
delay(wait);
}
//////////////////// Left //////////////////////
void left( int speed, int wait ) {
f_motor.print("2F6\r");
delay(10);
f_motor.print("1R6\r");
delay(10);
r_motor.print("2R6\r");
delay(10);
r_motor.print("1F6\r");
delay(10);
delay(wait);
}
//////////////////// Right //////////////////////
void right( int speed, int wait ) {
f_motor.print("2R6\r");
delay(10);
f_motor.print("1F6\r");
delay(10);
r_motor.print("2F6\r");
delay(10);
r_motor.print("1R6\r");
delay(10);
delay(wait);
}
BW-Robot – новая платформа для робота ездящего по линии.
Основная концепция робота перевозить грузы двигаясь по линии. Основные компоненты: Arduino Pro Atmega 168 16 Mhz (собственная разработка) Serial Motor Drivers – SparkFun.


{kind=link}