
Все для создания Роботов и не только. Умный дом, Tasmota, MQTT, Home Assistant.
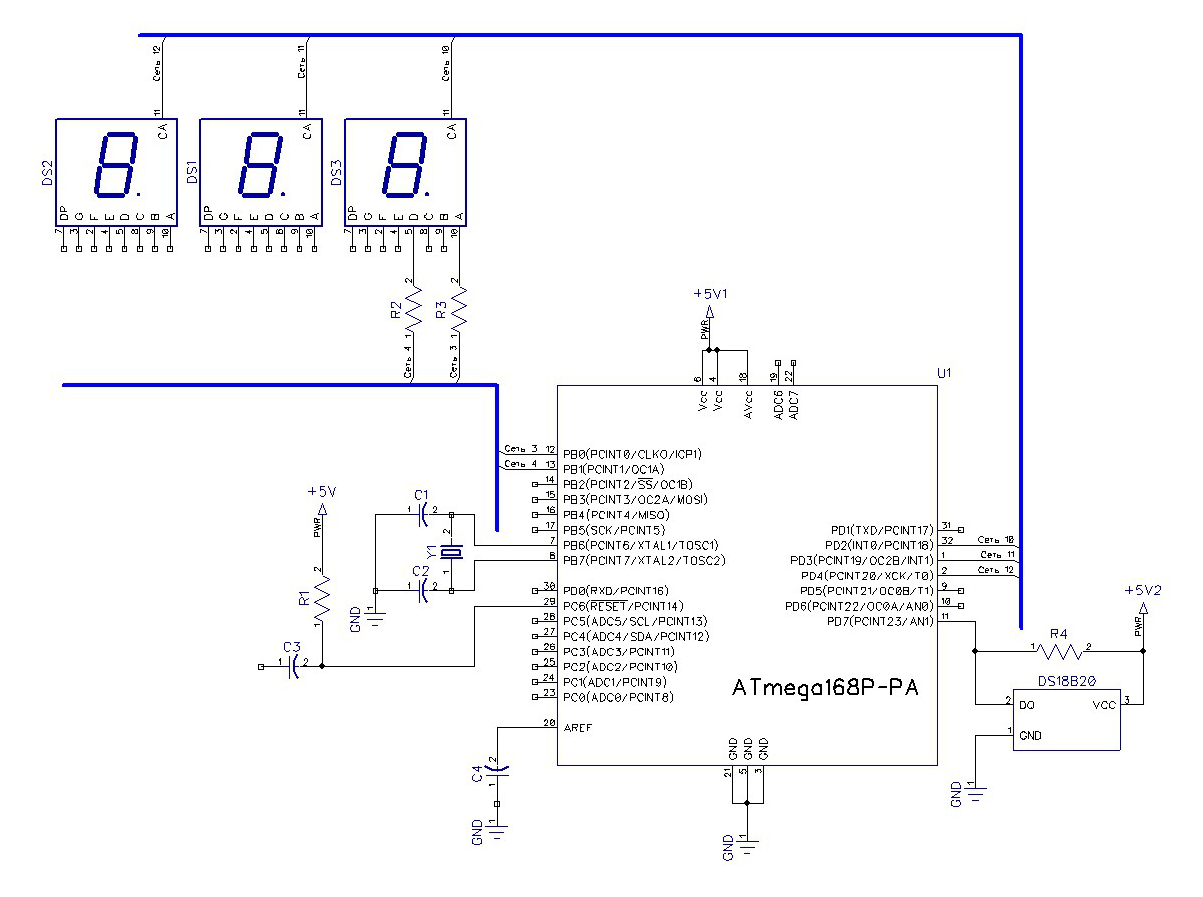
Термометр на ATmega 168P-PA
BA56-12GWA 7-сегментный трехразрядный светодиодный индикатор
Датчик DS18B20, схема основана на Arduino Pro.
Я думаю дорисовать и развести схему и плату не составит труда.
R2-R3 и так далее = 220 ом
R4 – 4.7 ком
#include "OneWire.h"
// #include "DallasTemperature.h"
#define ONE_WIRE_BUS 2
// OneWire oneWire(ONE_WIRE_BUS);
OneWire ds(ONE_WIRE_BUS);
// DallasTemperature sensors(&oneWire);
// DeviceAddress insideThermometer = { 0x28, 0x0C, 0x49, 0x7F, 0x05, 0x00, 0x00, 0x7E };
// const int LED = 6; // Test LED
byte addr[8] = { 0x28, 0x0C, 0x49, 0x7F, 0x05, 0x00, 0x00, 0x7E };
byte data[12];
#define LED 6
#define A A4
#define B A2
#define C 10
#define D 8
#define E 7
#define F A3
#define G 11
#define CA2 A0
#define CA1 13
#define CA3 A1
#define DP 9 // Точка
#define COOLER 5 // Вентилятор Не работает
const int segs[7] = { A, B, C, D, E, F, G };
const byte numbers[10] = {
0b1000000,
0b1111001,
0b0100100,
0b0110000,
0b0011001,
0b0010010,
0b0000010,
0b1111000,
0b0000000,
0b0010000 };
long previousMillis = 0;
long interval = 1000;
unsigned long currentMillis;
boolean run = false;
int thousands = 0;
int hundreds = 0;
int tens = 0;
int ones = 0;
void setup() {
Serial.begin(9600);
// sensors.begin();
// sensors.setResolution(insideThermometer, 9);
pinMode(LED, OUTPUT);
pinMode(13,OUTPUT); // Digital 1
pinMode(A0,OUTPUT); // Digital 2
pinMode(A1,OUTPUT); // Digital 3
pinMode(A4,OUTPUT); // SEG A
pinMode(A2,OUTPUT); // SEG B
pinMode(10,OUTPUT); // SEG C
pinMode(8,OUTPUT); // SEG D
pinMode(7,OUTPUT); // SEG E
pinMode(A3,OUTPUT); // SEG F
pinMode(11,OUTPUT); // SEG G
pinMode(DP,OUTPUT); // DP
digitalWrite(LED,HIGH);
}
void loop() {
byte i;
currentMillis = millis();
// sensors.requestTemperatures();
lightDigit1(numbers[thousands]); // temp%10]);
delay(5);
lightDigit2(numbers[hundreds]); // int(temp/10)]);
delay(5);
lightDigit3(numbers[tens]); // int(8)]);
delay(5);
// temp = sensors.getTempC(insideThermometer);
if(currentMillis - previousMillis > interval) {
previousMillis = currentMillis;
if (run) {
ds.reset();
ds.select(addr);
ds.write(0xBE);
for ( i = 0; i < 9; i++) data[i] = ds.read();
run = false;
int16_t raw = (data[1] << 8) | data[0];
int celsius = ((float)raw / 16.0)*100;
thousands = celsius/1000;
hundreds = (celsius%1000)/100;
tens = (celsius%100)/10;
ones = celsius%10;
// Serial.println(celsius);
// Serial.println(ones);
// Serial.println(tens);
// Serial.println(hundreds);
// Serial.println(thousands);
}
if (!run) {
ds.reset();
ds.select(addr);
ds.write(0x44,1);
run = true;
}
if (digitalRead(LED) == 1) {
digitalWrite(LED,LOW);
}
else {
digitalWrite(LED,HIGH);
}
}
}
void lightDigit1(byte number) {
digitalWrite(CA1,HIGH);
digitalWrite(CA2,LOW);
digitalWrite(CA3,LOW);
digitalWrite(DP, HIGH);
lightSegments(number);
}
void lightDigit2(byte number) {
digitalWrite(CA1,LOW);
digitalWrite(CA2,HIGH);
digitalWrite(CA3,LOW);
digitalWrite(DP, LOW);
lightSegments(number);
}
void lightDigit3(byte number) {
digitalWrite(CA1,LOW);
digitalWrite(CA2,LOW);
digitalWrite(CA3,HIGH);
digitalWrite(DP, HIGH);
lightSegments(number);
}
void lightSegments(byte number) {
for (int i = 0; i < 7; i++) {
int bit = bitRead(number, i);
digitalWrite(segs[i], bit);
}
}
Замечание: Исходник:
Смысл в том что ATmega168 не есть ATmega168P и у них разные сигнатуры. Решение: В файле \arduino-1.0.3\hardware\arduino\boards.txt в строке diecimila.build.mcu=atmega168 добавляете буковку p (пэ англ.), сохраняете файл, перезапускаете IDE. ############################################################## diecimila.name=Arduino Diecimila or Duemilanove w/ ATmega168 diecimila.upload.protocol=arduino diecimila.upload.maximum_size=14336 diecimila.upload.speed=19200 diecimila.bootloader.low_fuses=0xff diecimila.bootloader.high_fuses=0xdd diecimila.bootloader.extended_fuses=0x00 diecimila.bootloader.path=atmega diecimila.bootloader.file=ATmegaBOOT_168_diecimila.hex diecimila.bootloader.unlock_bits=0x3F diecimila.bootloader.lock_bits=0x0F diecimila.build.mcu=atmega168p diecimila.build.f_cpu=16000000L diecimila.build.core=arduino diecimila.build.variant=standard ############################################################## И будет вам счастье.
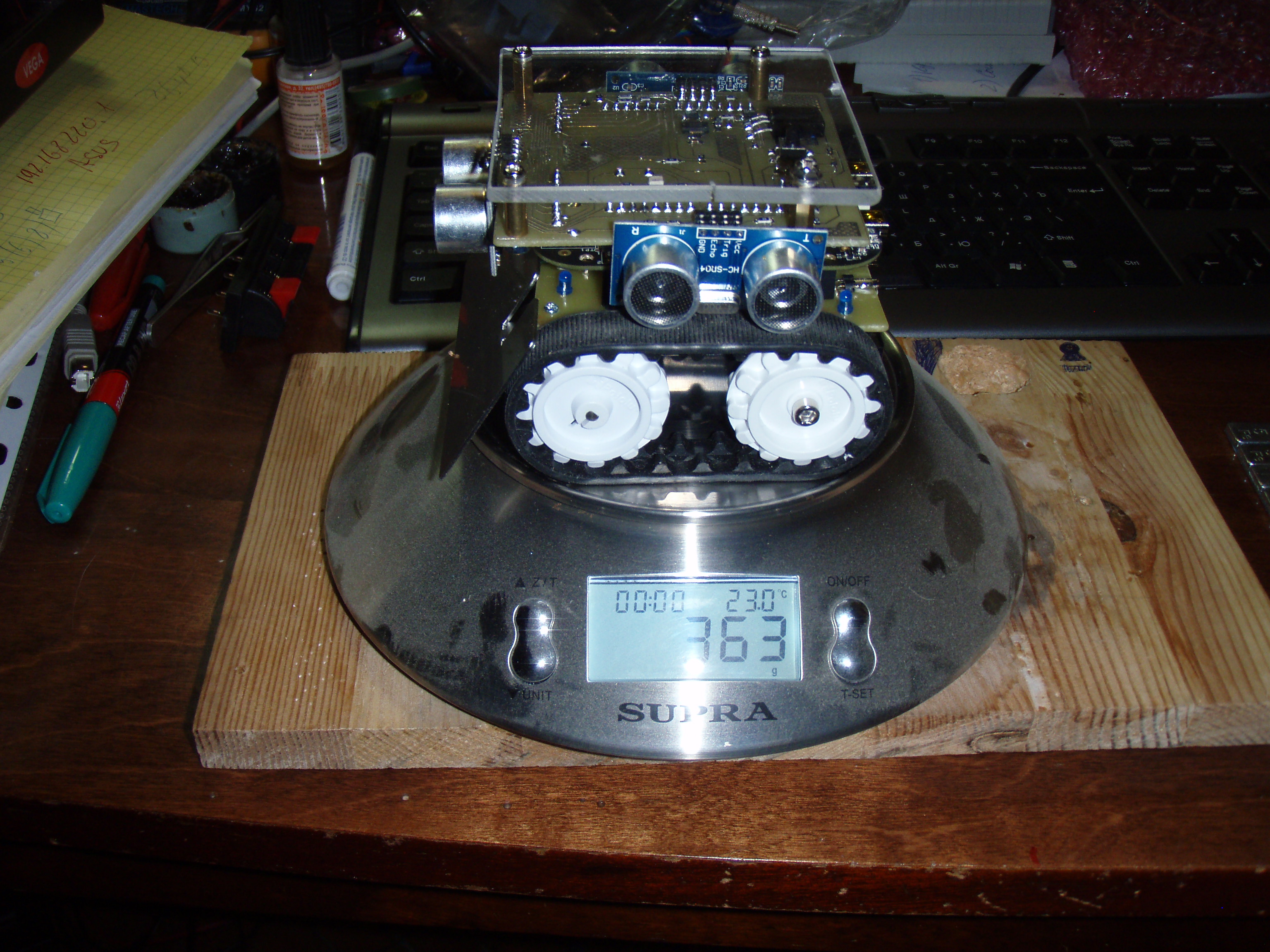
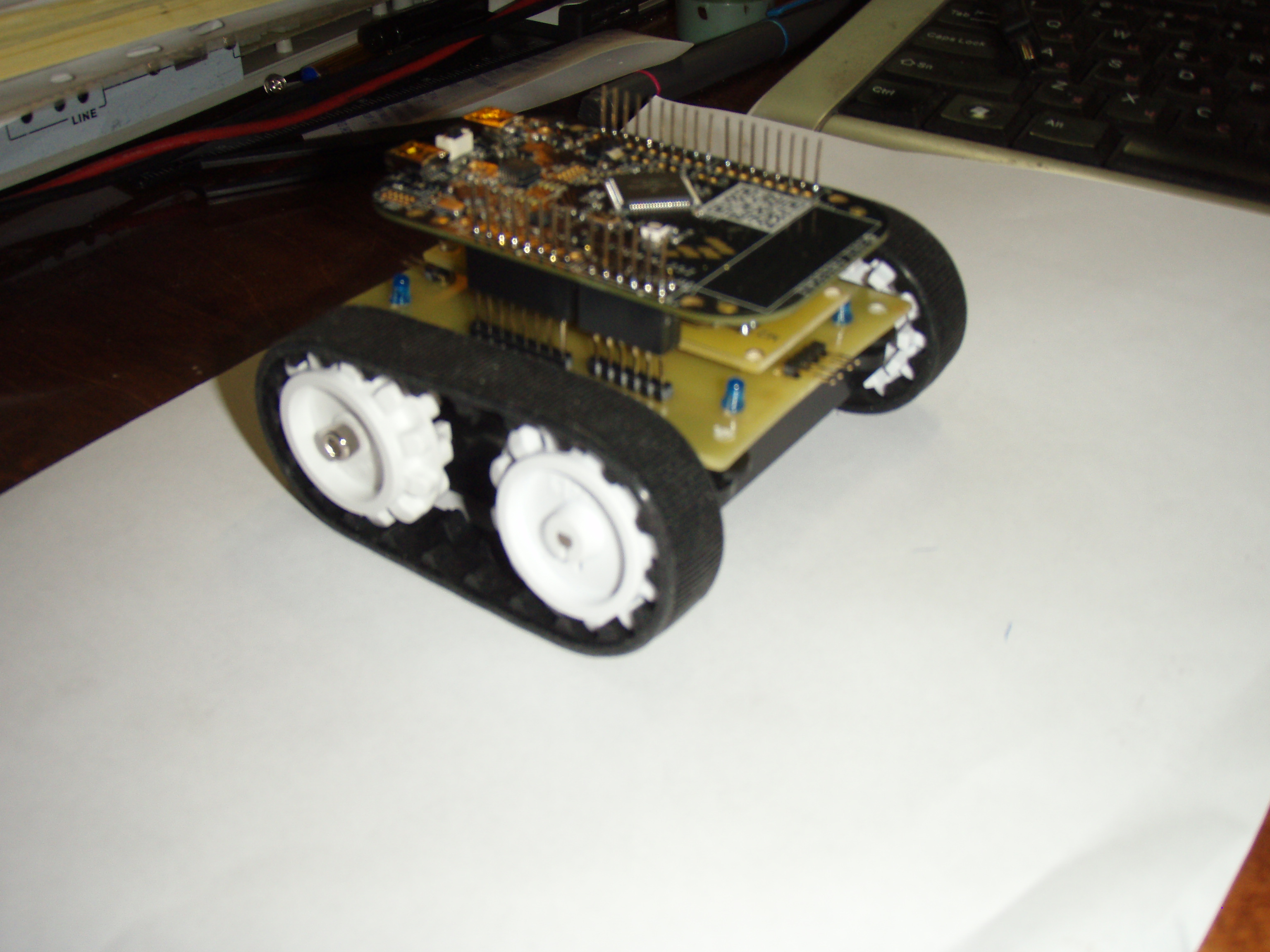
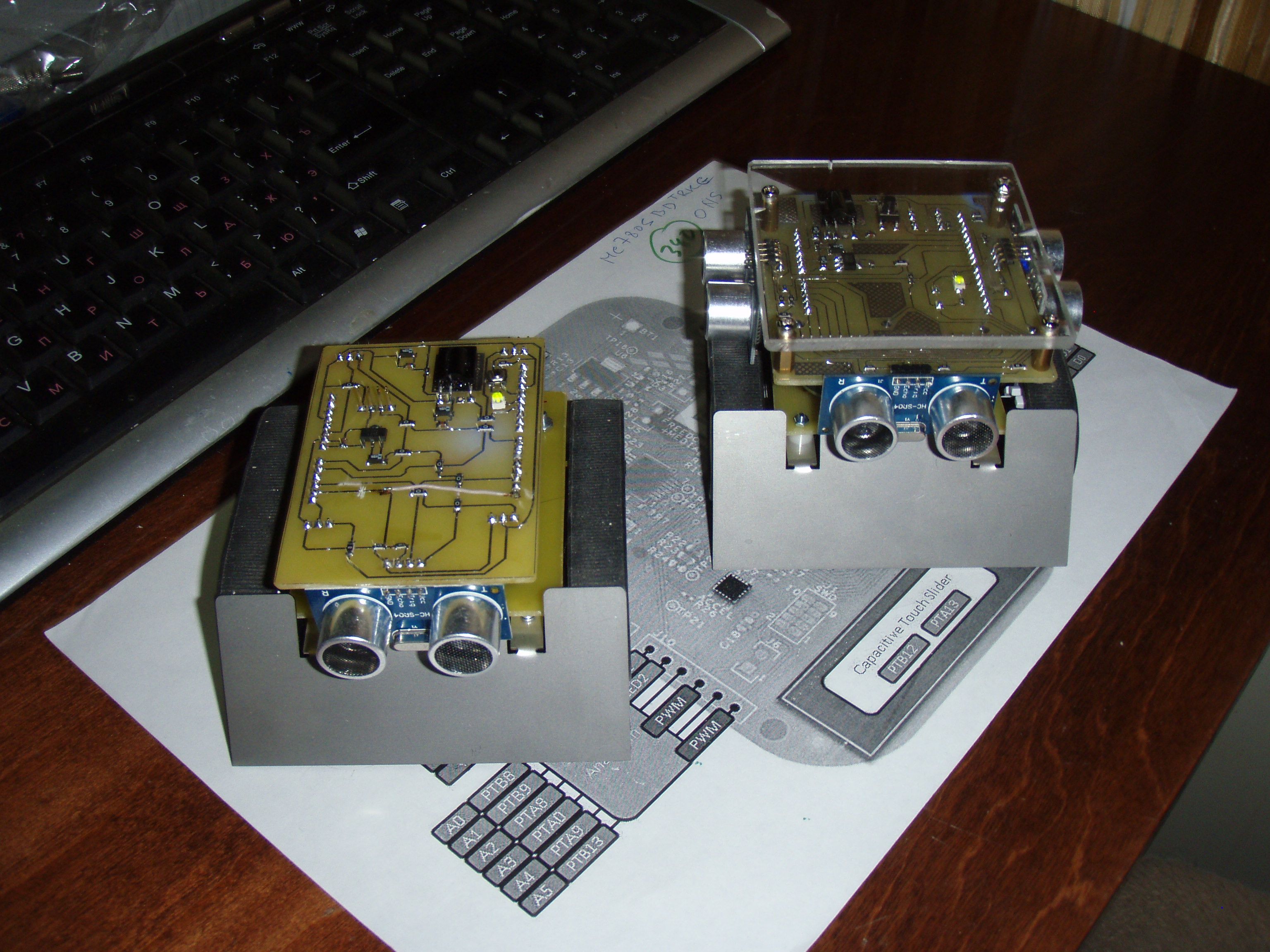
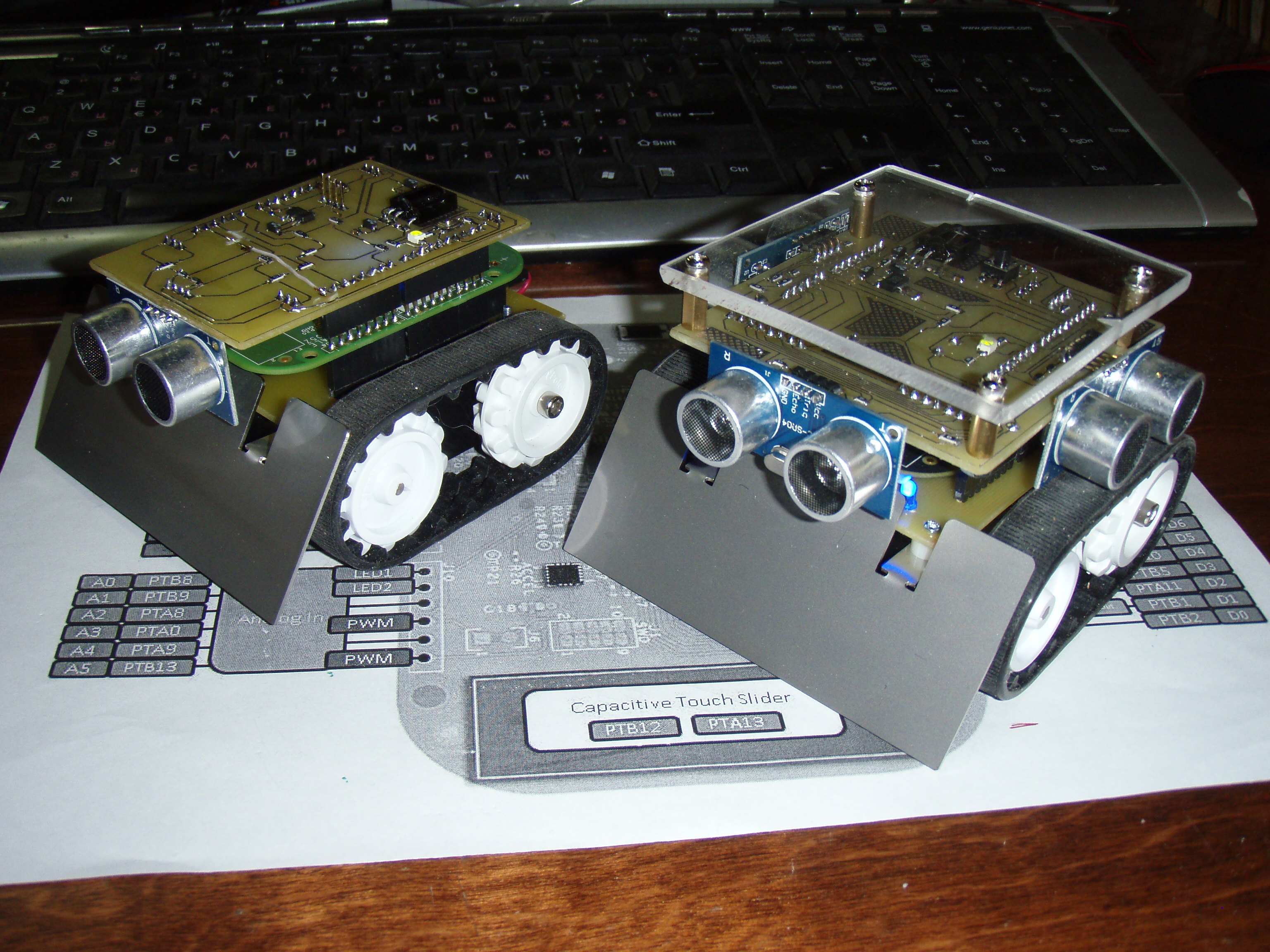
Из чего все это собирается:
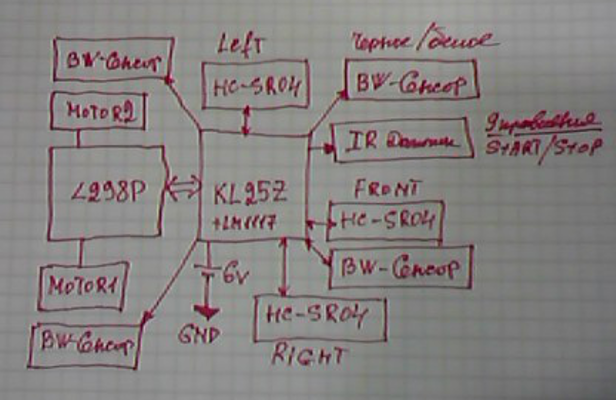
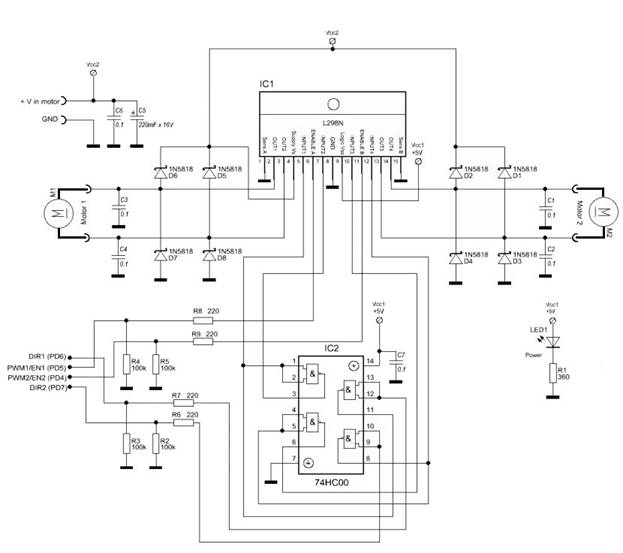
Продолжаем строить. Блок управления двигателями. L298P + LC74H00.

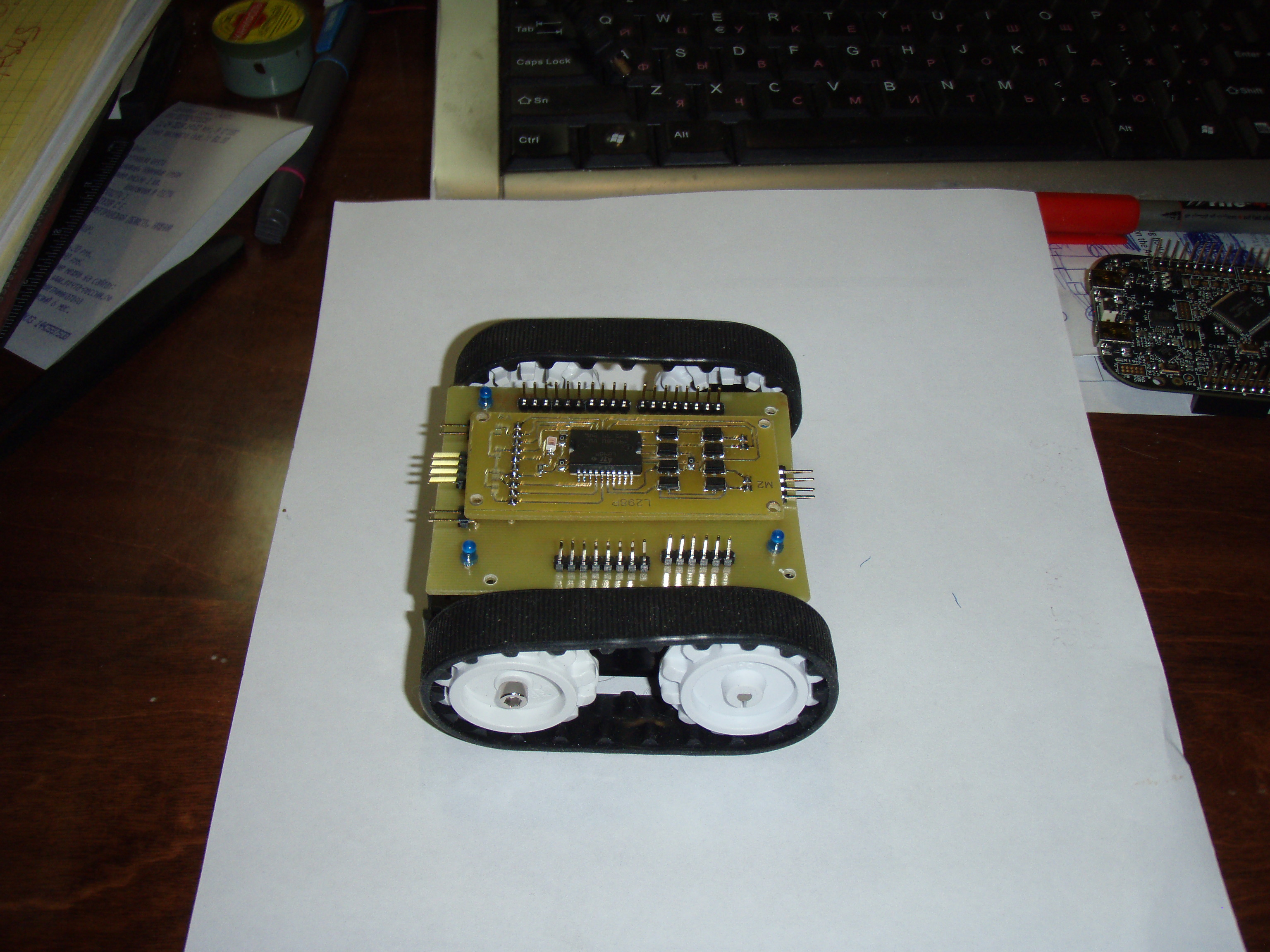
Первую часть собрали, драйвер двигателей. L298P

| CPU: | ARM® Cortex™-A7 Dual-Core |
|---|---|
| GPU: | ARM® Mali400MP2, Complies with OpenGL ES 2.0/1.1 |
| Память: | 1GB DDR3 @960M |
| Накопитель: | встроенная 4GB NAND flash, расширяемая до 64GB (есть слот uSD). |
| Жесткий диск: | возможность подключения 2.5″ SATA объемом до 2T |
| Питание: | 5VDC, 2A или USB otg |
| Сеть: | 10/100 ethernet, возможно подключение wifi dongle |
| USB: | 2x USB 2.0 HOST, 1x USB 2.0 OTG |
| Прочие интерфейсы: | 2×96 pin, I2C, SPI, RGB/LVDS, CSI/TS, FM-IN, ADC, CVBS, VGA, SPDIF-OUT |
| ИК порт: | 1x |
| ОС: | Android, Ubuntu, Fedora и др. |