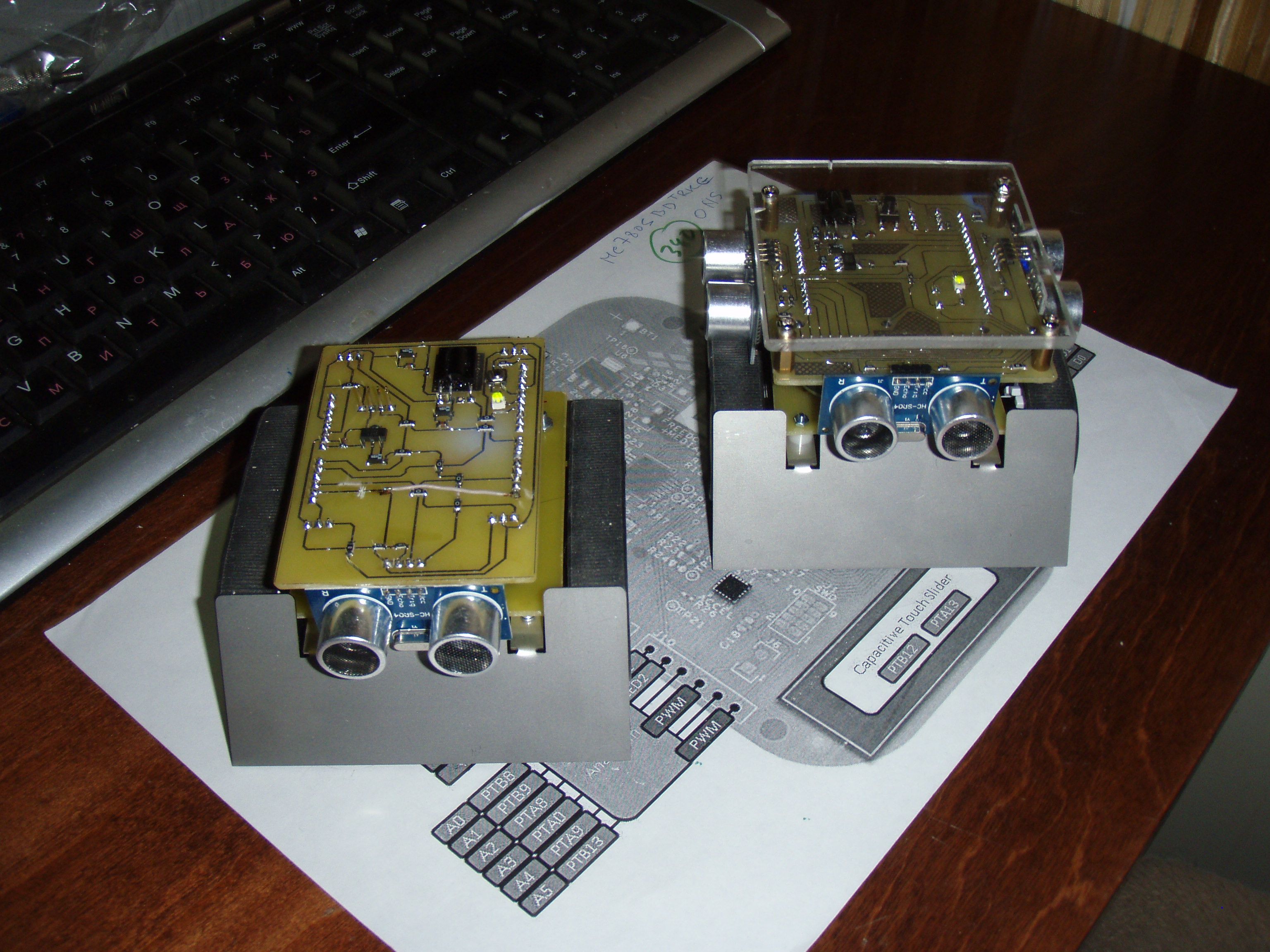
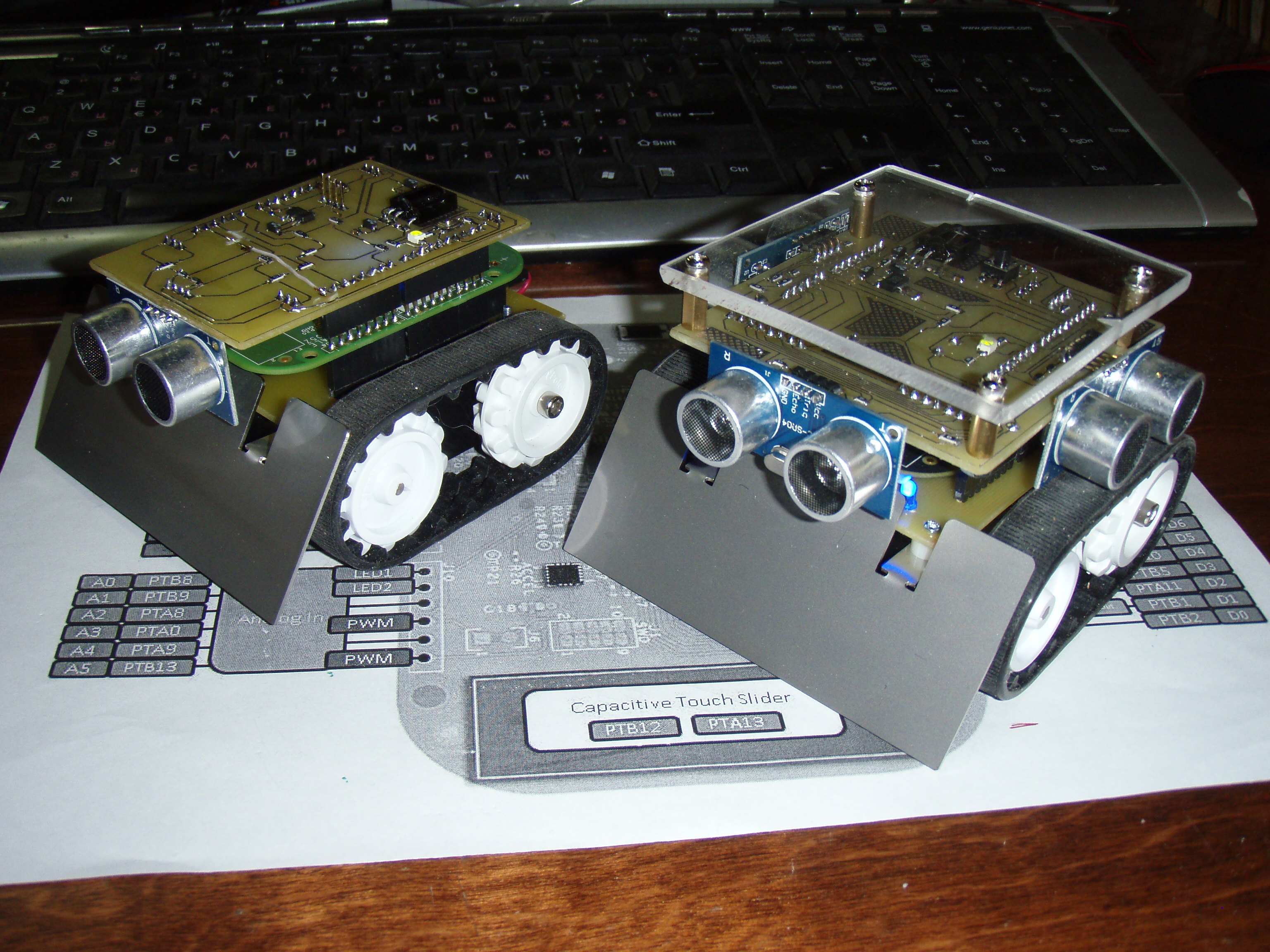
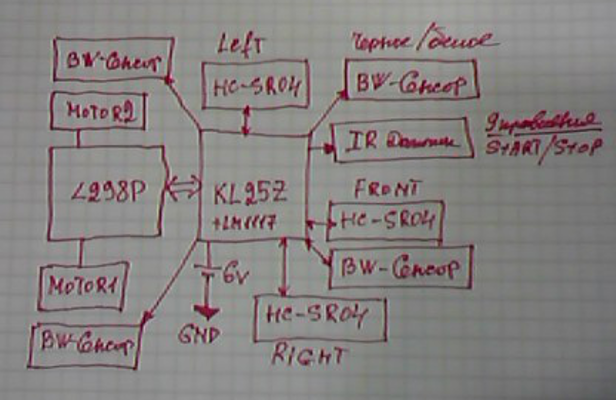
Из чего все это собирается:
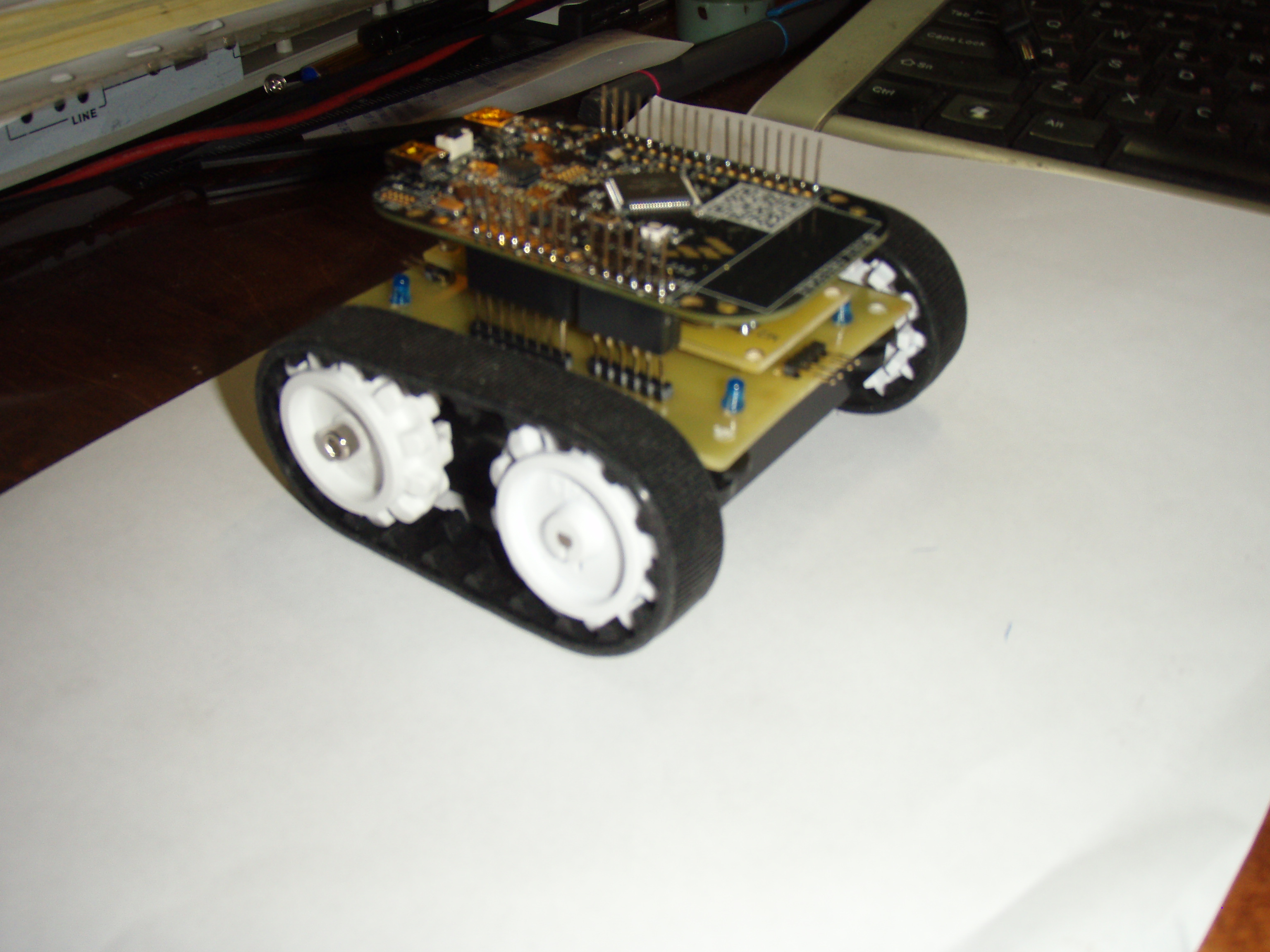
- mbed FRDM-KL25Z
- Zumo Chassis Kit
- МИКРО МОТОР-РЕДУКТОР 300ОБ/МИН 0,6КГСМ
- ИК ПРИЁМНИК (TSOP)
- Ультрозвуковой дальномер HC-SR04
- L298P
- Датчик цвета поверхности OR-BWSENS (черное/белое)
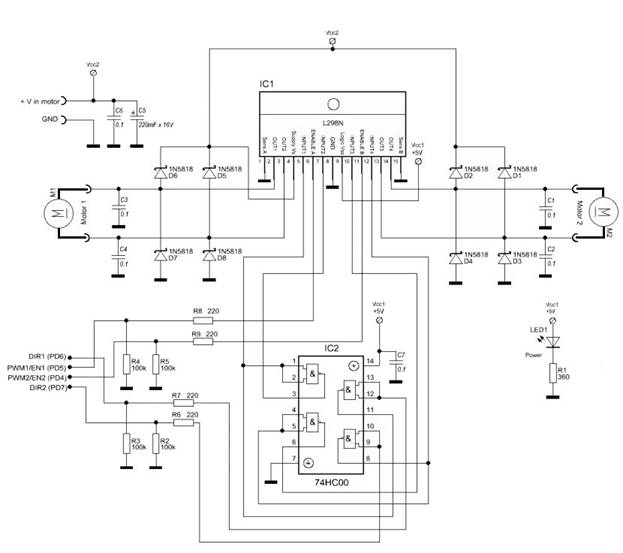
Продолжаем строить. Блок управления двигателями. L298P + LC74H00.

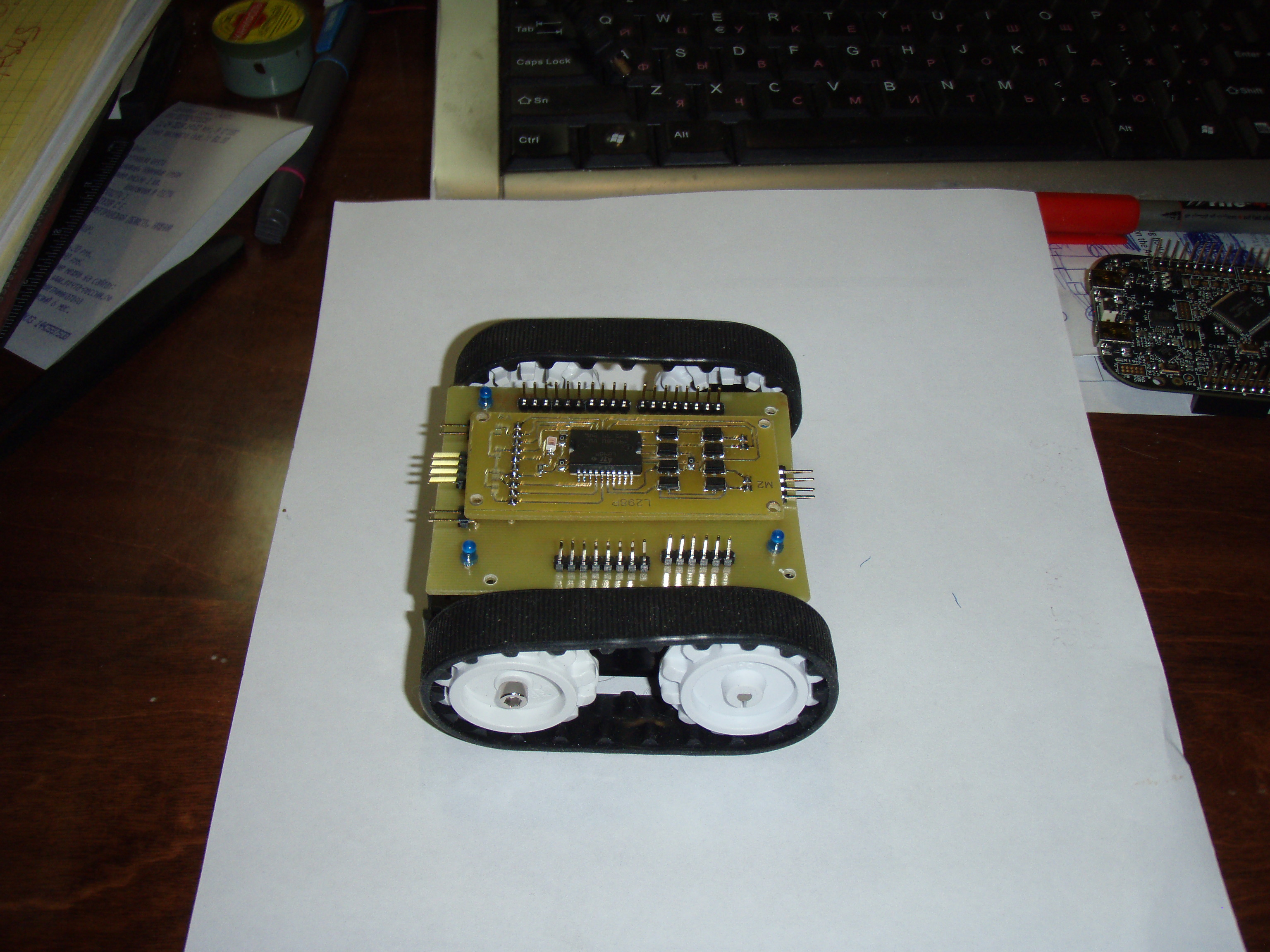
Первую часть собрали, драйвер двигателей. L298P