Все работает.
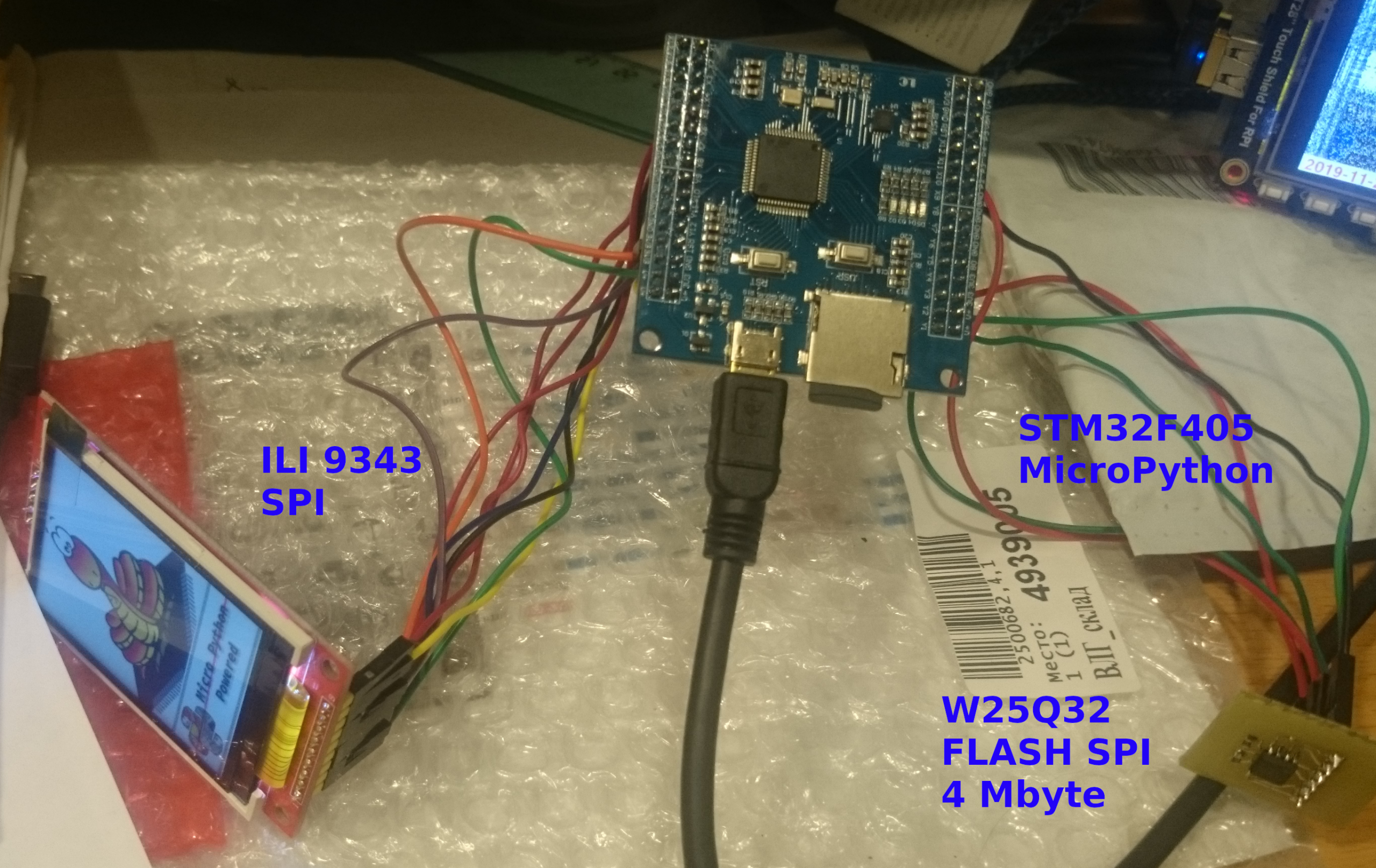
W25Q32 – https://forum.micropython.org/viewtopic.php?t=3899&start=10
Все для создания Роботов и не только. Умный дом, Tasmota, MQTT, Home Assistant.
X17 – Лучше не использовать (BOOT1)
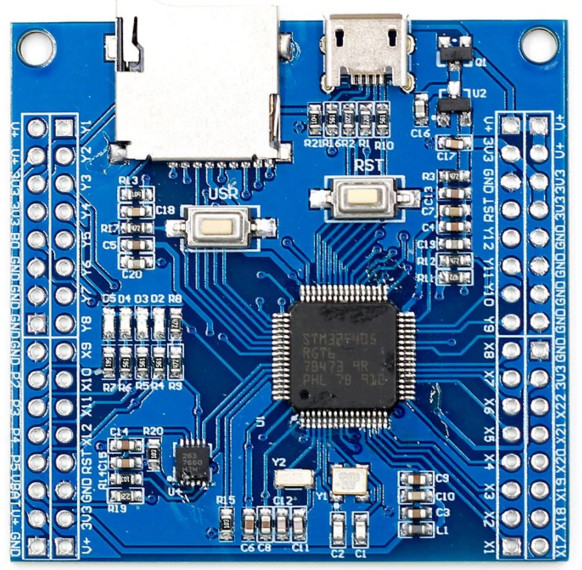
1. STM32F405RG MCU
2. 168 мгц Cortex-M4 Процессор с 32-битными оборудования с плавающей точкой
3. 1 мб флэш-памяти, 192 кб оперативной памяти
4. USB порт, последовательный порт, универсальная память, HID протокол
5. Слот для sd-карты
6. MMA76603 осевой ускоритель
7. 4 светодиода, одна кнопка сброса, одна универсальная кнопка
8. 3 V 0.3A на борту LDO, питание от USB или внешний аккумулятор
9. Часы в режиме реального времени
10. 30 шт GPIO 28 шт. из них поддерживают вход и выход 5 в
11. 2xSPI, 2xCAN, 2xI2C, 5xUART, 14 шт 12 бит ADC PIN, 2 ADC PIN
Если SDCARD не вставлена то загрузка boot.py происходит с FLASH памяти. Если SDCARD вставлена, то загрузка происходит с этой карточки.
Firmware suitable for PYBv1.1 boards: http://micropython.org/download#pyboard
Для прошивки нужно B0 подключить к 3V3.
Схем в интернете не нашел. Оригинальная схема конечно не соответствует. http://docs.micropython.org/en/latest/pyboard/general.html
Моя копия схемы.PYBv11

Pinout Excel: STM32F405-MICROPYTHON
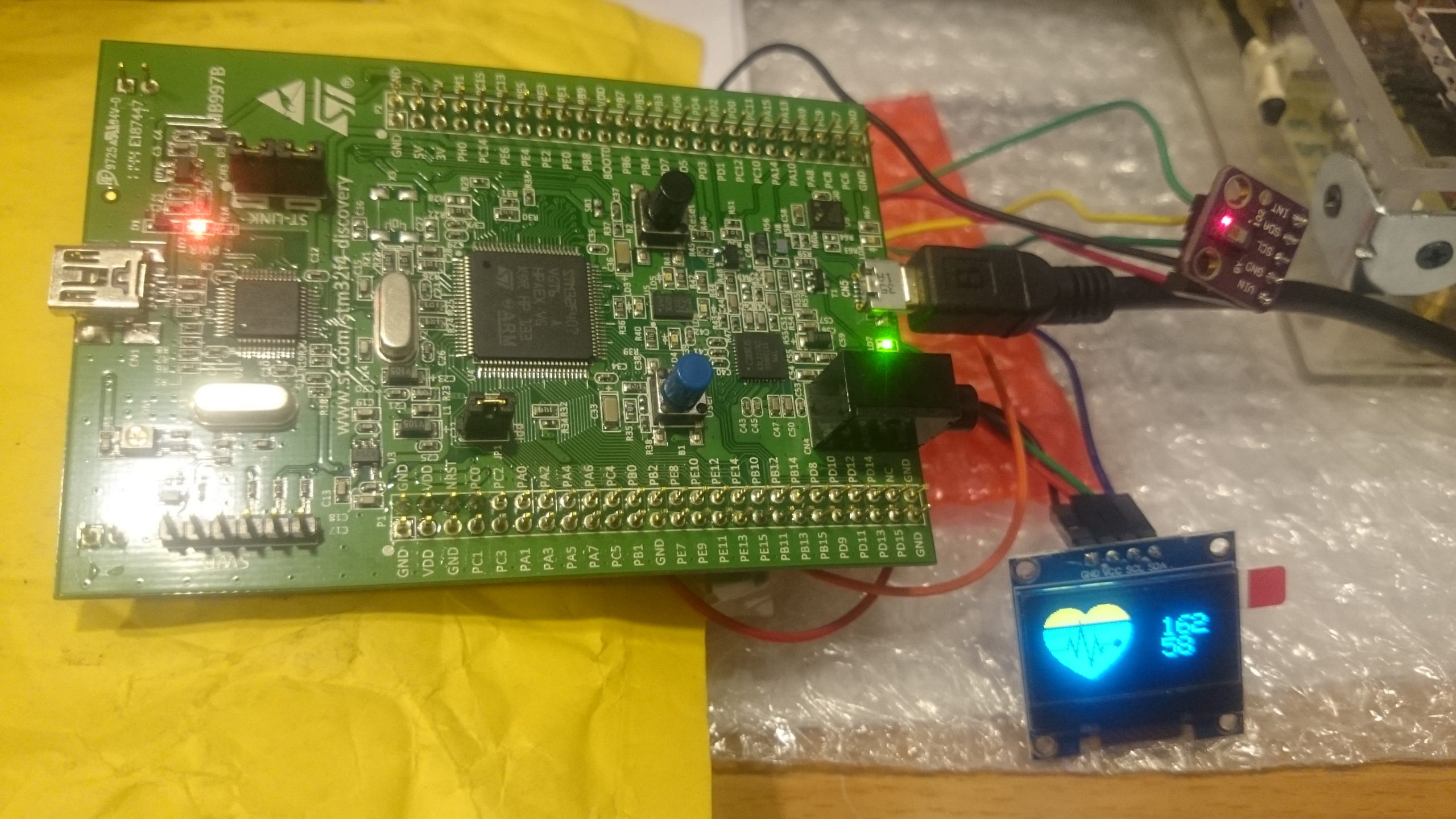
Описание: Пульсоксиметрия от Maxim: новый датчик MAX30102
Micropython + STM32F4Discovery = Работает
Подправил для STM32F4Discovery: max30102
Компания SIMCom анонсировала SIM33ELA – новый навигационный ГЛОНАСС/GPS приёмник в дизайне с интегрированной чип-антенной . Данный модуль ориентирован для работы в составе устройств, для которых критичным являются малые габариты в сочетании с необходимостью скрытой антенны для приёма навигационных сигналов. Примером такого применения может являться автомобильный трекер-закладка, персональный трекер, иные портативные телеметрические устройства.
Вместе со всеми достоинствами технического характера, этот модуль производится одним из крупнейших поставщиков OEM модулей в мире, компанией SIMCom Wireless Solutions, традиционно пользующейся популярностью в России за высокое качество, низкие цены, сжатые сроки поставки, полную техническую документацию и оперативную техническую поддержку.
Приемник рекомендуется к применению в устройствах мониторинга автотранспорта, автомобильных охранно-поисковых устройствах и терминалах ЭРА-ГЛОНАСС.
Основные характеристики ГЛОНАСС/GPS модуля SIM33ELA:
Функциональные особенности:
Электрические характеристики:


Обновление от 12.11.2019
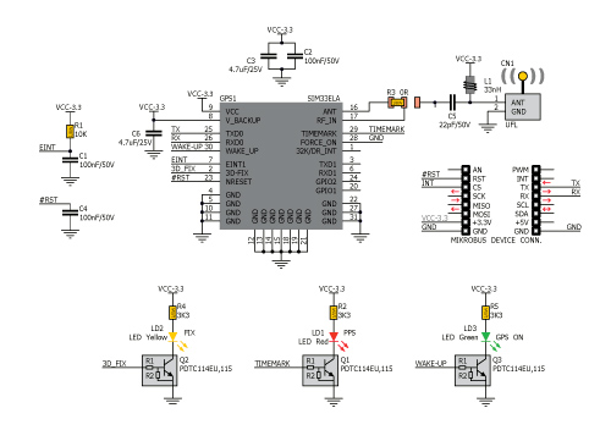
Вот собрал, все работает.

MicroPython – чтение данных с порта GPS:
from pyb import UART
uart = UART(3, 9600)
uart.init(9600, bits=8, parity=None, stop=1, timeout=3000)
while True:
data = uart.readline()
print(str(data, ‘ascii’).strip())
parseGPS(data)