И все это работает.
Все для создания Роботов и не только. Умный дом, Tasmota, MQTT, Home Assistant.
И все это работает.
Библиотека тут: https://github.com/micropython/micropython/tree/master/drivers/sdcard
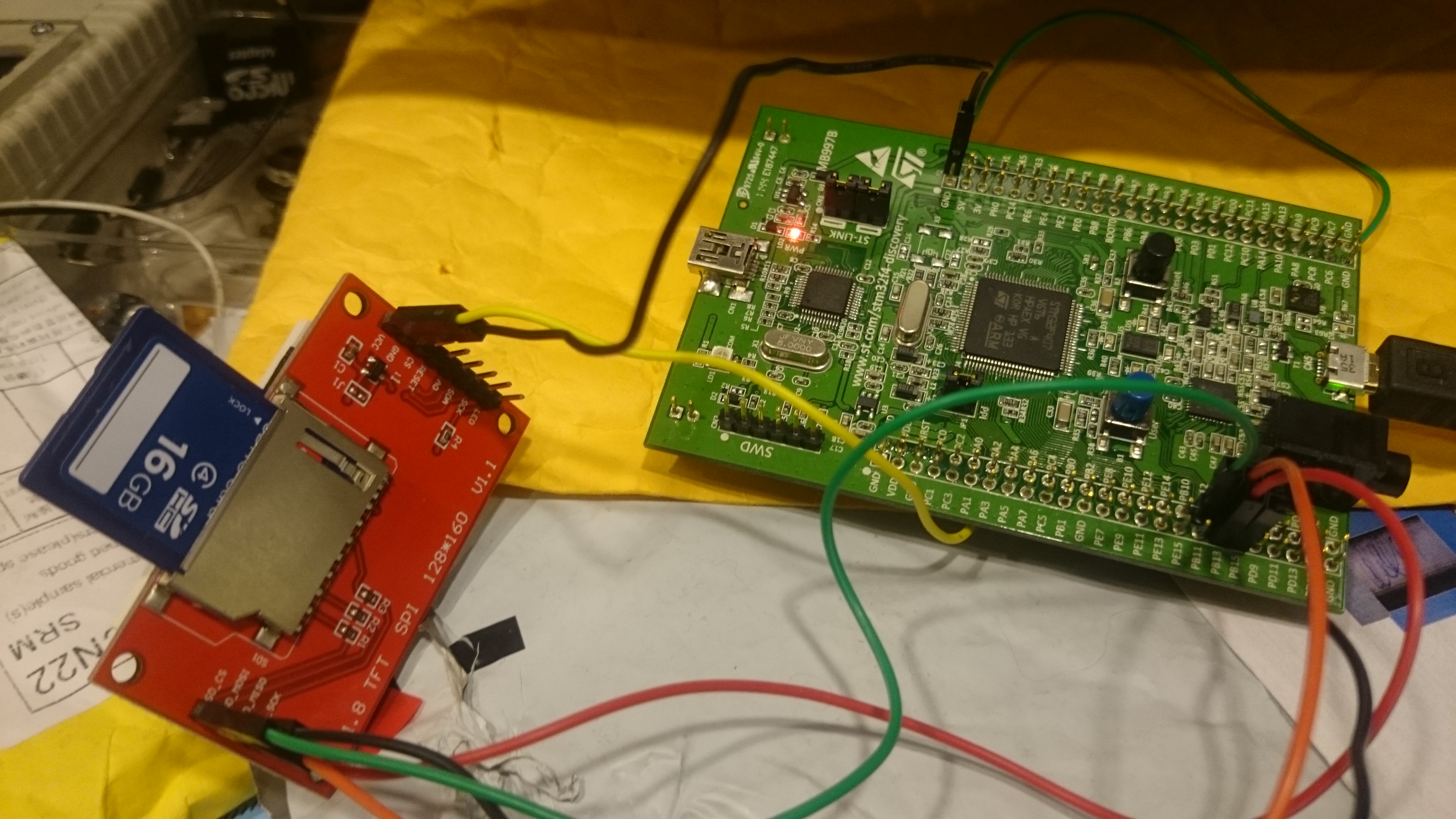
Подключили на SPI2 (CS, SCK, MISO, MOSI) = (Y5, Y6, Y7, Y8) = (PB12, PB13, PB14, PB15)
Модуль 1.8 inch SPI TFT LCD Display Module ST7735 128×160 (Aliexpress)

Проверенно все работает (Под Windows 7/8/10) все прошивается. После прошивки убрать только
>> dir(network)
[‘__class__’, ‘__name__’, ‘WIZNET5K’, ‘route’]
>>>
Простой пример с выходом по синей кнопке.
Работает, но не очень.
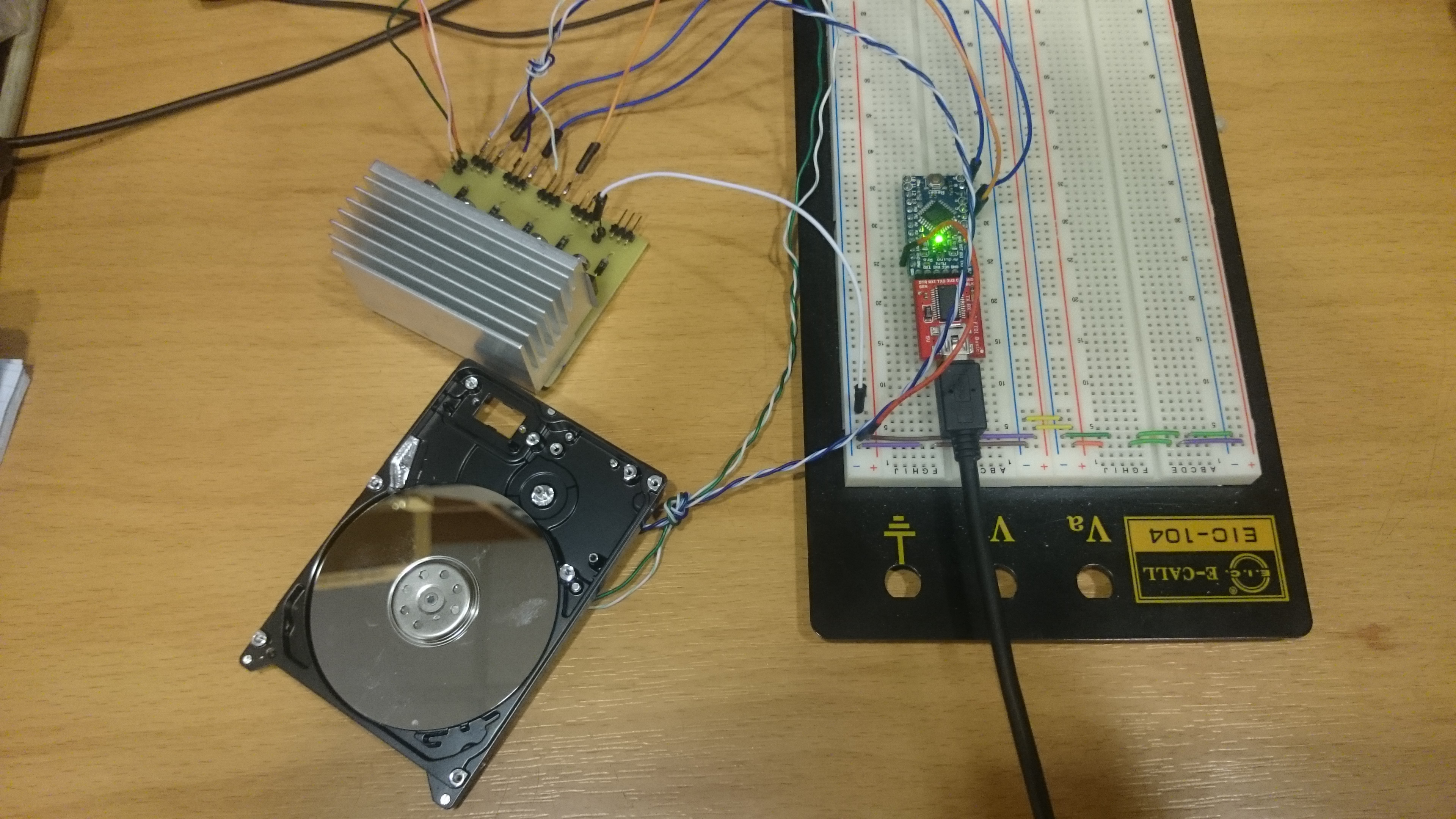
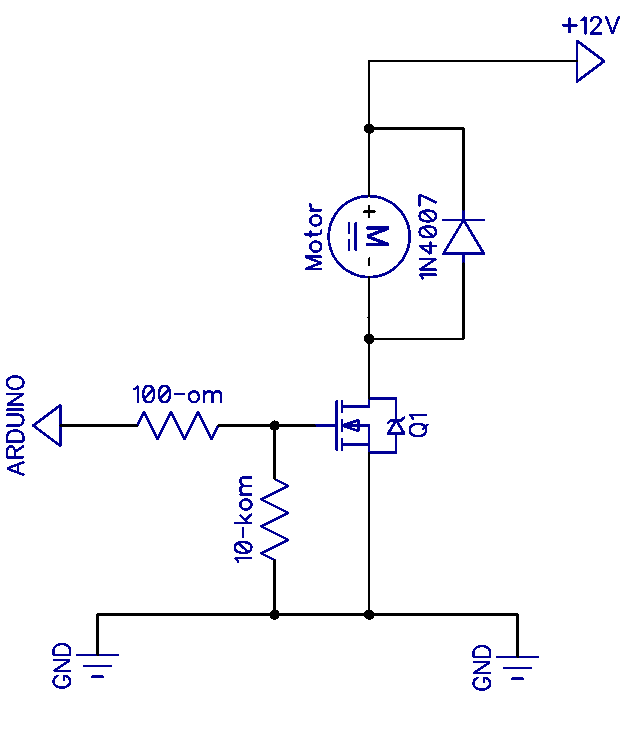
Драйвер для двигателей.
Источник: http://theamateurprogrammer.blogspot.com/2014/02/revitalizing-old-hard-drive-motors.html