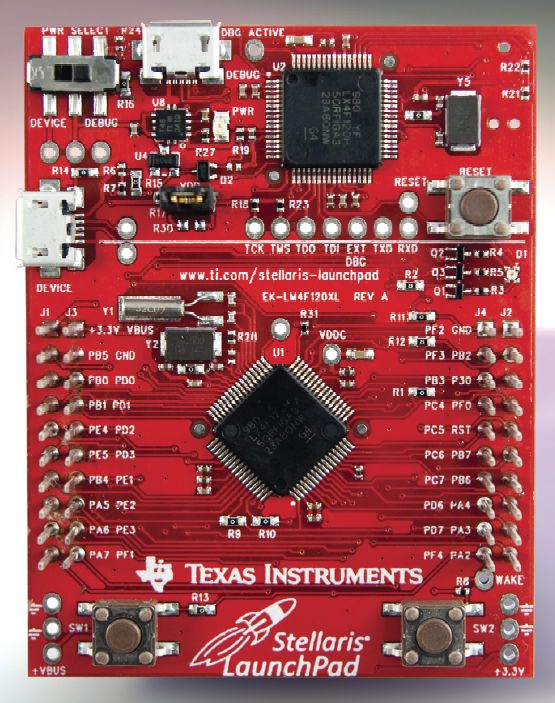
EK-LM4F120XL – недорогая оценочная платформа для изучения ARM Cortex-M4F микроконтроллеров семейства Stellaris от Texas Instruments. Плата выполнена на высокопроизводительном микроконтроллере LM4F120H5QR с интерфейсом USB2.0 Device и модулем гибернации.
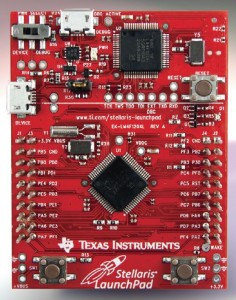
Так же EK-LM4F120XL включает программируемые пользовательские кнопки и RGB светодиод. Разъемы расширения позволяют с легкостью расширить функционал платы путем подключения Stellaris®BoosterPacks и MSP430™ BoosterPacks.
Программное обеспечение Stellaris Ware® обеспечивает разработчика доступом ко всем периферийным устройствам, имеющимся на плате EK-LM4F120XL. В его состав входит библиотека Stellaris®Peripheral Driver Library, с помощью которой можно с легкостью использовать все периферийные модули, доступные на микроконтроллере, а благодаря большому количеству примеров, раскрывающих все тонкости работы с данным микроконтроллером, разработчик в кратчайшие сроки сможет реализовать собственные решения.
Отличительные особенности:
- микроконтроллер Stellaris® LM4F120H5QR, 80 МГц, ARM Cortex-M4F;
- разъем MicroUSB type B для SB Device;
- пользовательский RGB светодиод;
- 2 программируемые пользовательские кнопки;
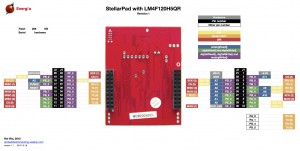
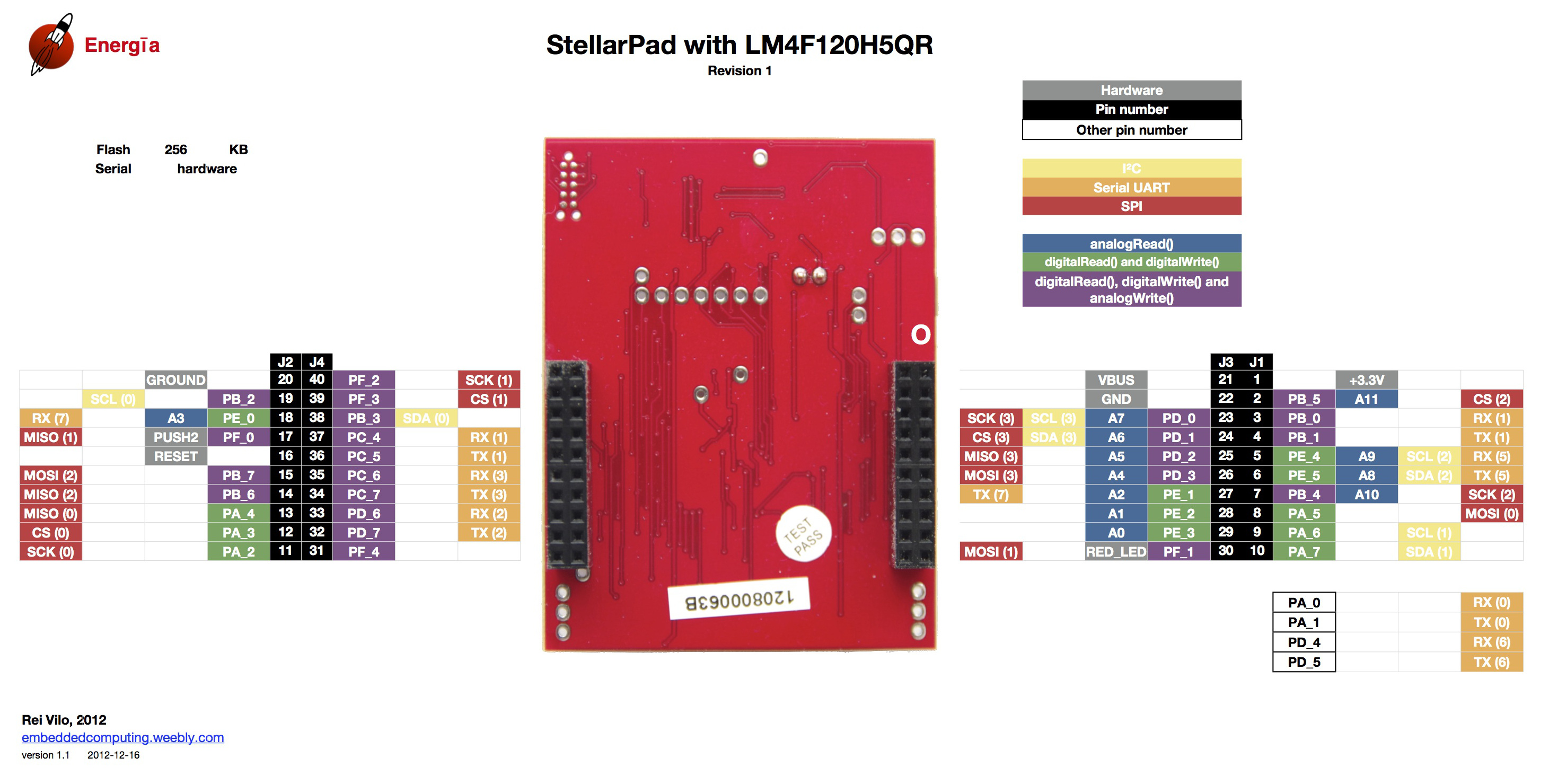
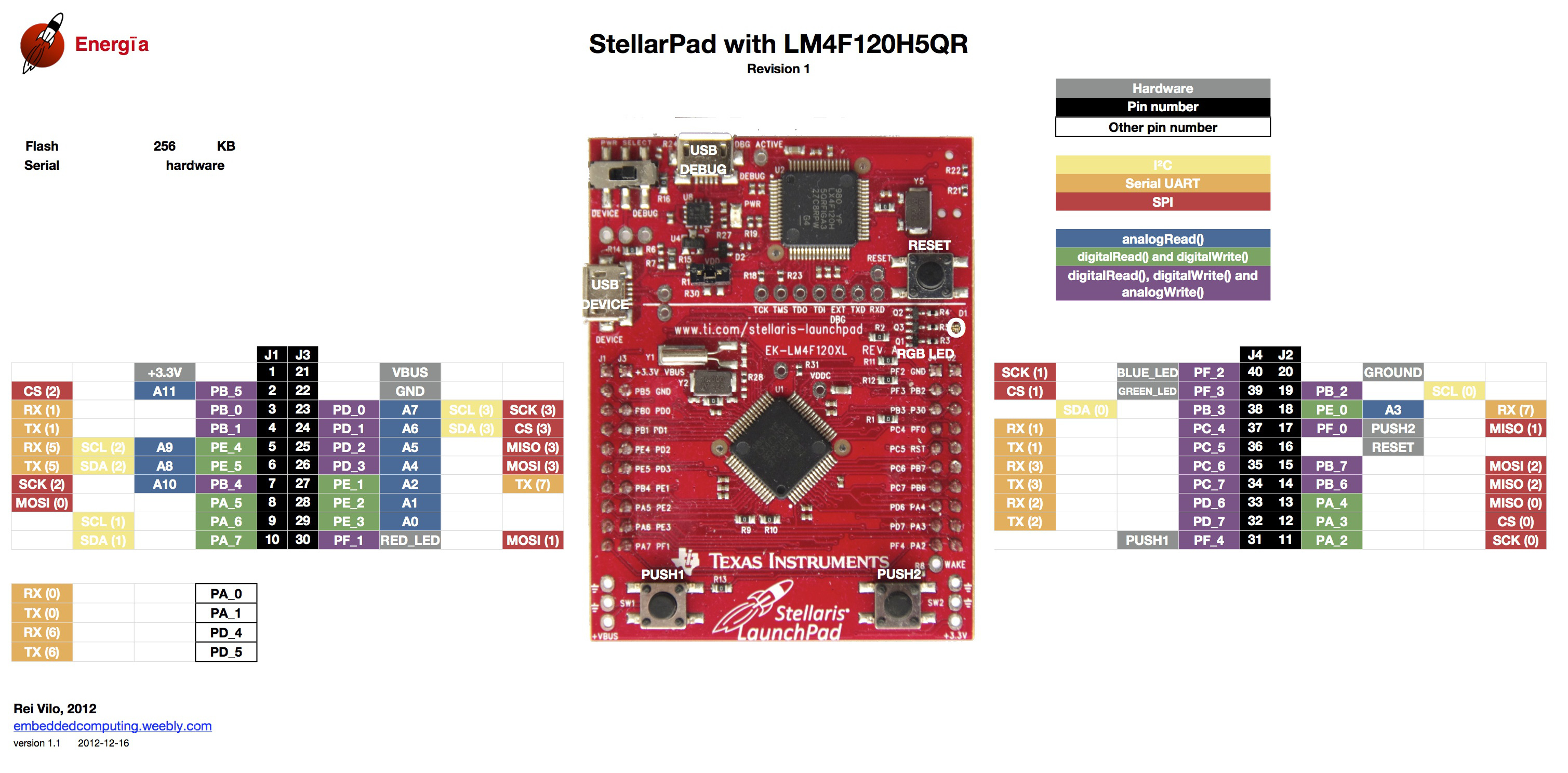
- выводы GPIO вынесены на внешний разъем;
- встроенный отладчик Stellaris® In-Circuit Debug Interface (ICDI);
- переключаемый источник питания (ICDI, USBDevice);
- кнопка сброса;
- предустановленная программа управления светодиодом;
- поддержка Stellaris Ware®.
- Много примеров.





{kind=link}