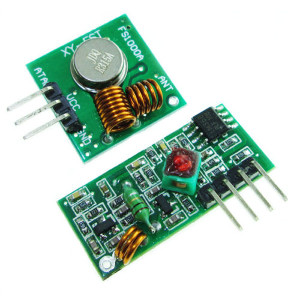
Приемник:
Model: MX-05V
Working voltage: 5V DC quiescent current: 4mA
Receiver Frequency: 433.92MHZ
Receiver sensitivity:-105DB
Size: 30 * 14 * 7mm
Передатчик:
Model: MX-FS-03V
Transmission Distance :20-200 m (dependent on supply voltage)
Operating Voltage :3.5-12V
Dimensions: 19 * 19mm
AM transfer rate: 4KB / S
Transmission power: 10mW
Emission frequency: 433M
- Описание:
- Купить:
- Library: (local copy:VirtualWire)