
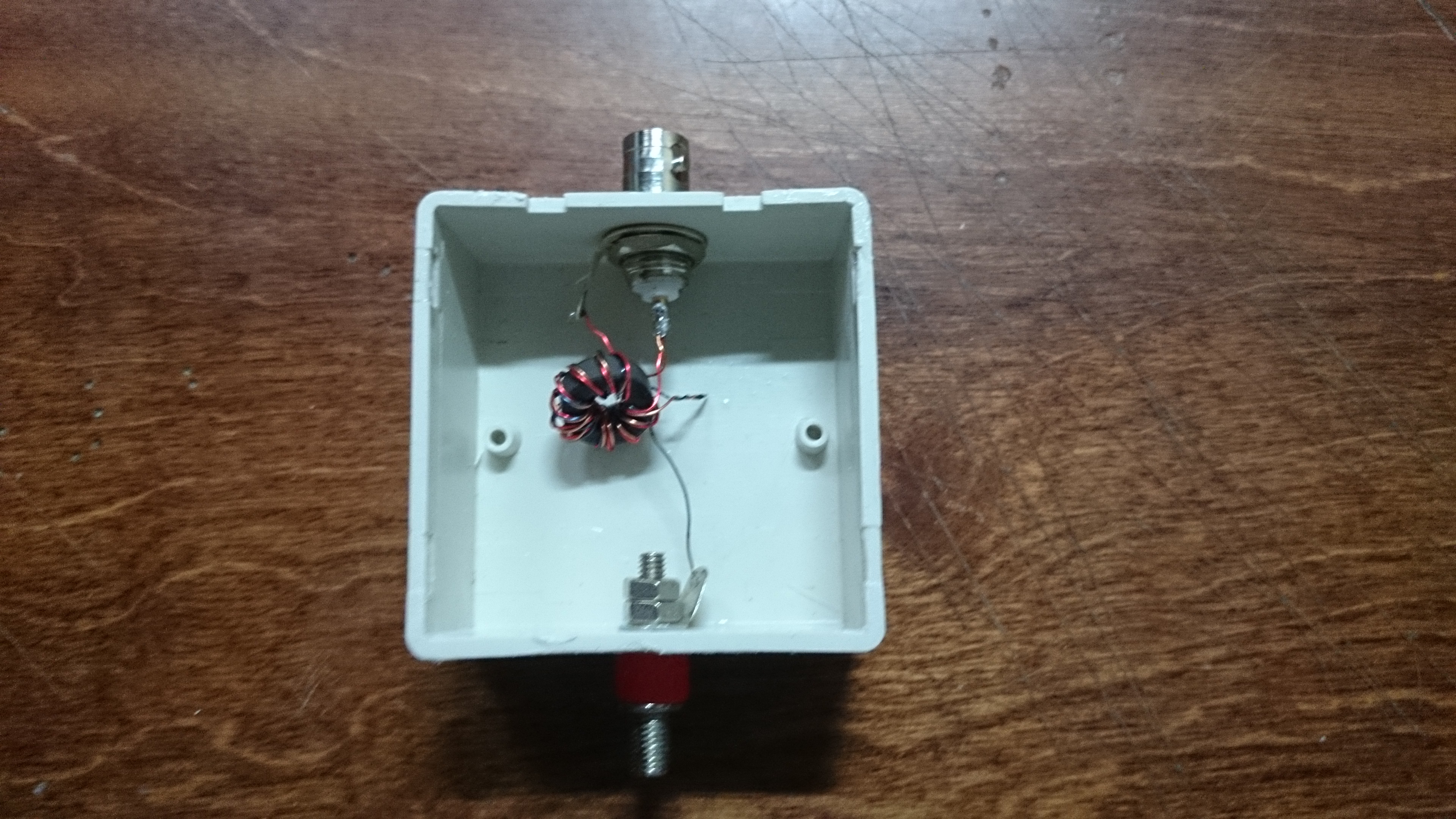

DS1820 В защитном корпусе
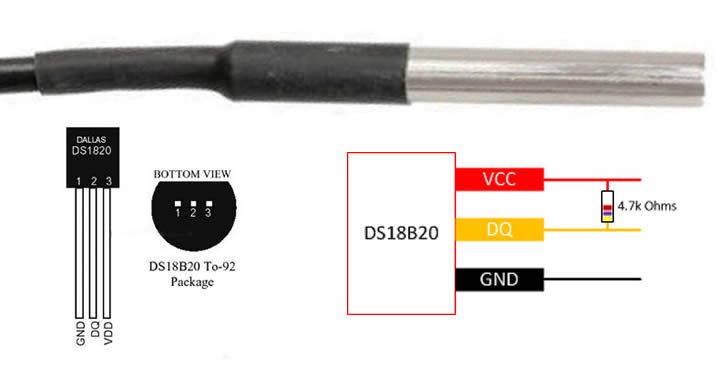
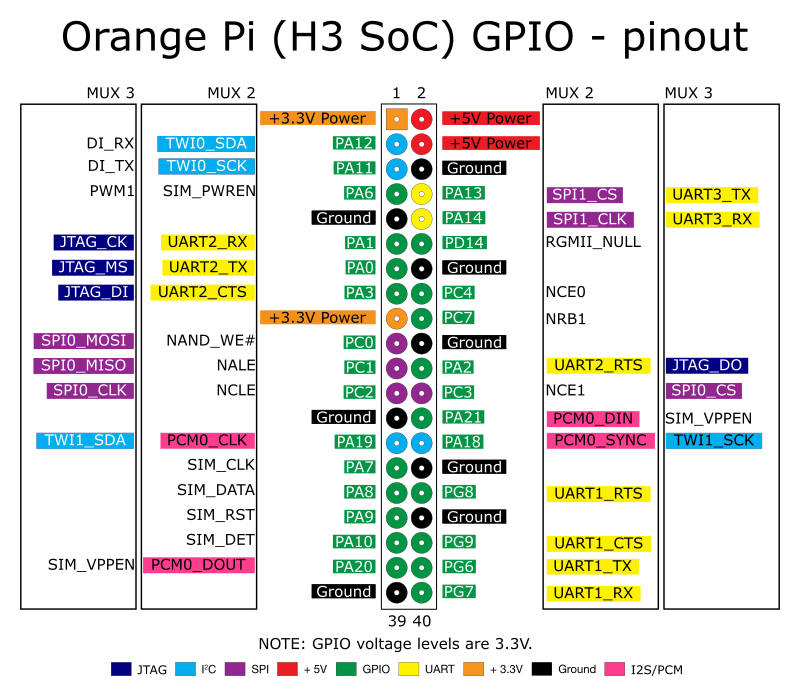
Orange Pi Lite и DS1820

Data -> pin 37
3.3v -> pin 17
GND -> pin 9
Добавить
/etc/modules-load.d/modules.conf
8189es
gpio_sunxi
w1-sunxi
w1-gpio
w1-therm
#gc2035
По умолчанию стоит в script.fix
[w1_para]
w1_used = 1
gpio = 20
После перегрузки
lsmod
Module Size Used by
w1_therm 2498 0
w1_gpio 1402 0
wire 18294 2 w1_gpio,w1_therm
w1_sunxi 1451 0
8189es 1076034 0
ls /sys/bus/w1/devices
28-000003def4c0
w1_bus_master1
cd /sys/bus/w1/devices/28-000003def4c0
cat w1_slave c0 01 4b 45 1f ff 10 10 1f : crc=0f YES
c0 01 4b 45 1f ff 10 10 1f t=25283
Температура 25*C
Вот и все
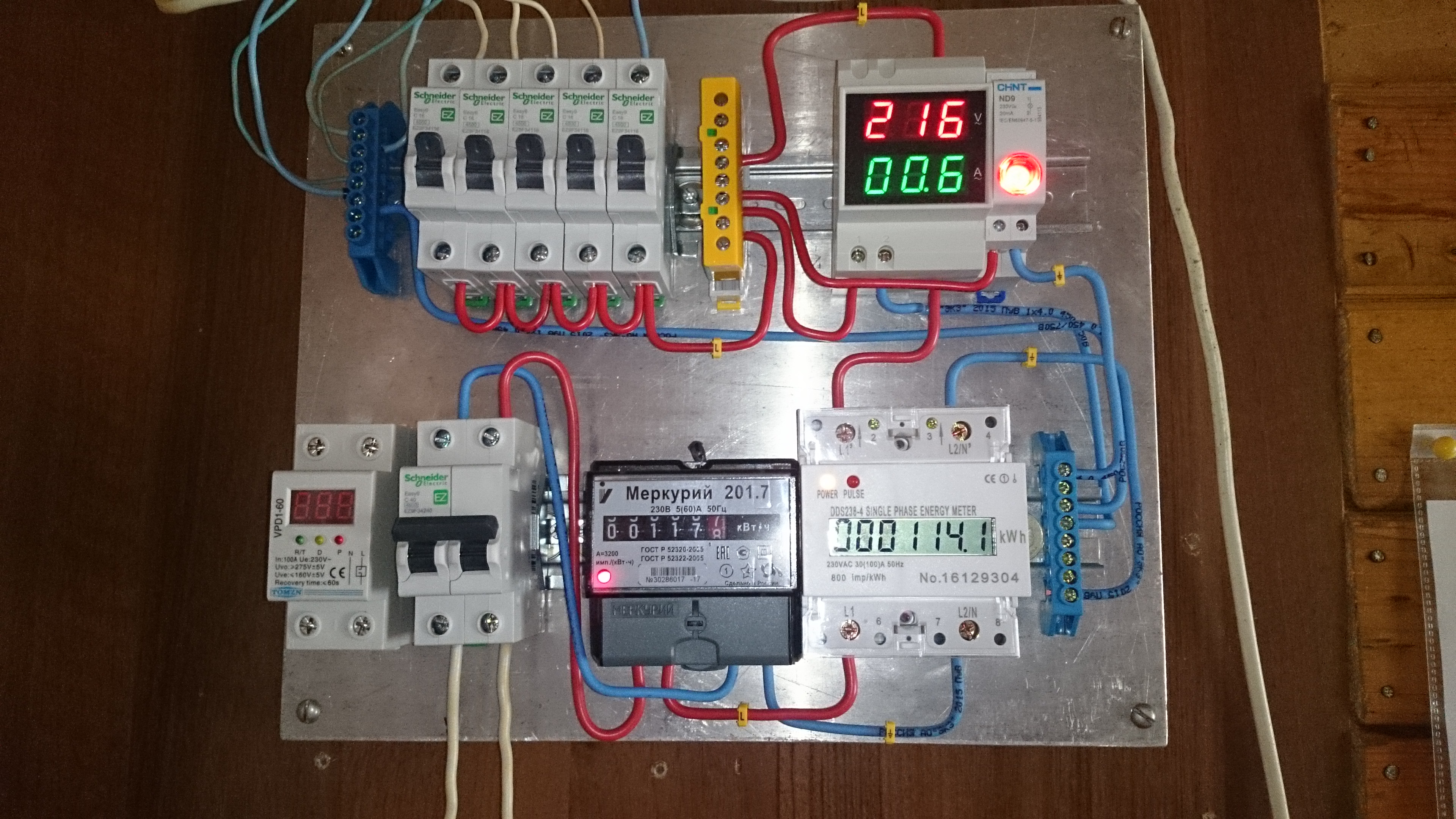
Электрика на даче.


Orange Pi Lite

Важно: Питание должно быть 5 Вольт, а не меньше !
При 4.5в – Запускается с проблемами.
Включить OTG как консоль. Источник.
echo “g_serial” >> /etc/modules
mkdir -p /etc/systemd/system/serial-getty@ttyGS0.service.d
vi /etc/systemd/system/serial-getty@ttyGS0.service.d/10-switch-role.conf
Должна быть запись.
[Service]
ExecStartPre=-/bin/sh -c “echo 2 > /sys/bus/platform/devices/sunxi_usb_udc/otg_role”
После делаем следующие.
systemctl –no-reload enable serial-getty@ttyGS0.service
echo “ttyGS0” >> /etc/securetty
reboot
Драйвер порта для XP.
Gadget-Serial-v4-2