03.10.2013 [17:07], Сергей Карасёв
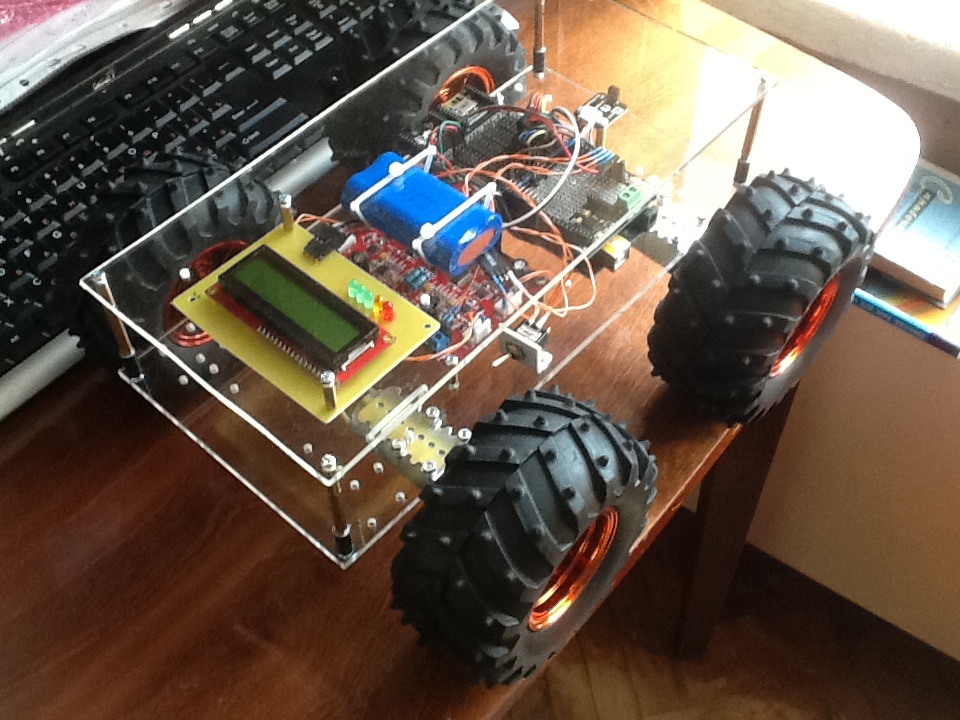
Корпорация Intel представила плату для разработчиков Galileo — свой первый продукт, полностью совместимый с платформой Arduino.
Напомним, что Arduino представляет собой аппаратную вычислительную платформу, основными компонентами которой являются простая плата ввода/вывода и среда разработки на языке Processing/Wiring. Arduino используется разработчиками устройств и образовательными учреждениями в обучающих целях.
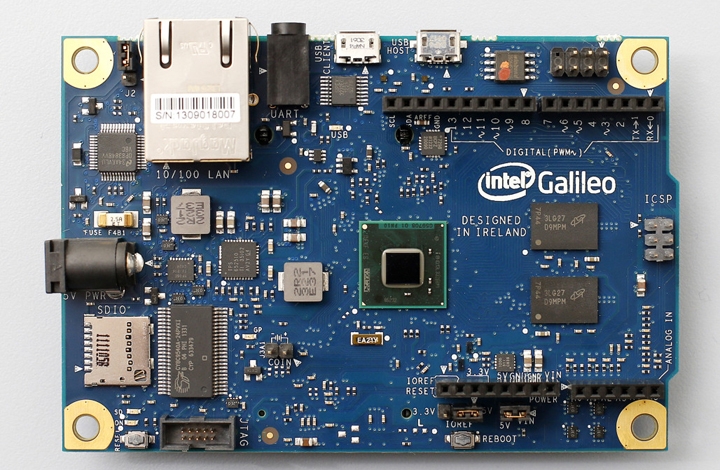
Плата Intel Galileo выполнена на основе крошечного процессора Quark X1000. Этот 32-битный чип имеет одно ядро с возможностью выполнения одного потока инструкций; тактовая частота составляет до 400 МГц.
Galileo поддерживает такие интерфейсы, как ACPI, PCI Express, 10/100 Ethernet, SD, USB 2.0, UART и RS-232.
Плата использует операционную систему на ядре Linux с библиотеками Arduino. Осуществлять программирование можно с компьютеров на основе Mac OS Х, Windows и Linux.
Поставки Galileo начнутся к концу ноября. Корпорация Intel пообещала, что в течение следующих полутора лет 50 000 экземпляров платы будут бесплатно переданы 1000 университетам по всему миру.
Источник: http://www.3dnews.ru/765626/