Архив метки: ARDUINO
GPS Clock – Часы c GPS (no RTC)
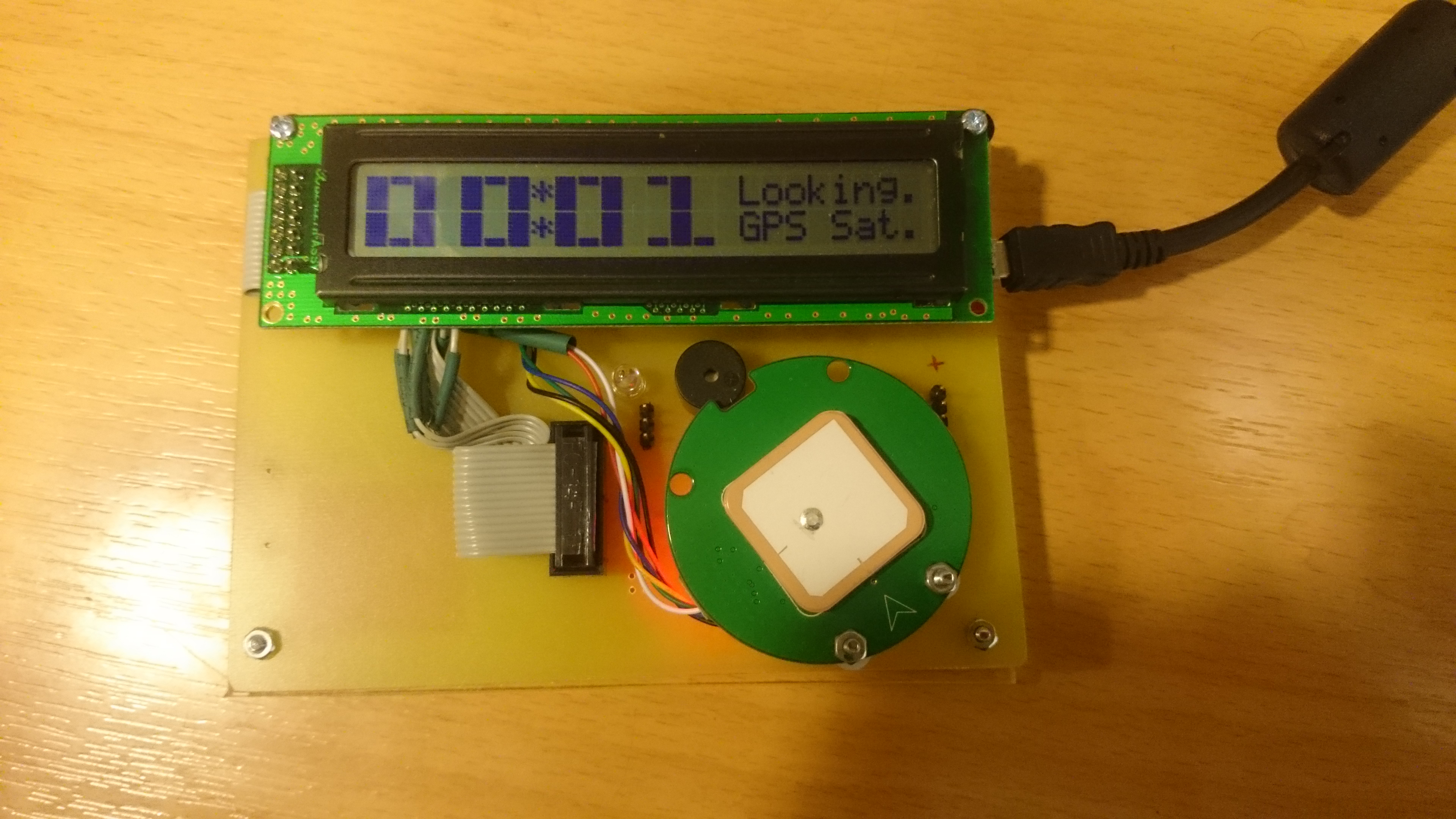
Исходный код: Clock_From_RFID_PCB
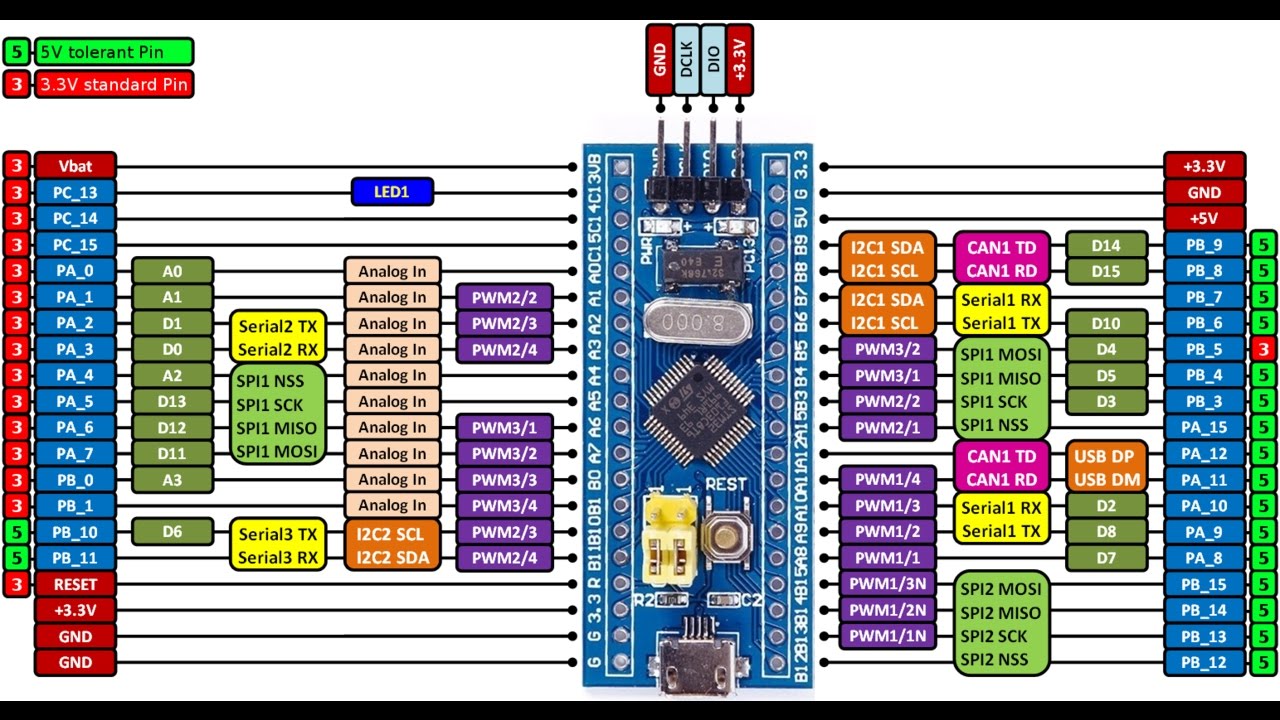
STM32F103C8T6 ARM STM32 Cortex-M3 – Arduino

Arduino ATmega 2560 16AU + CP2102 (USB to UART)
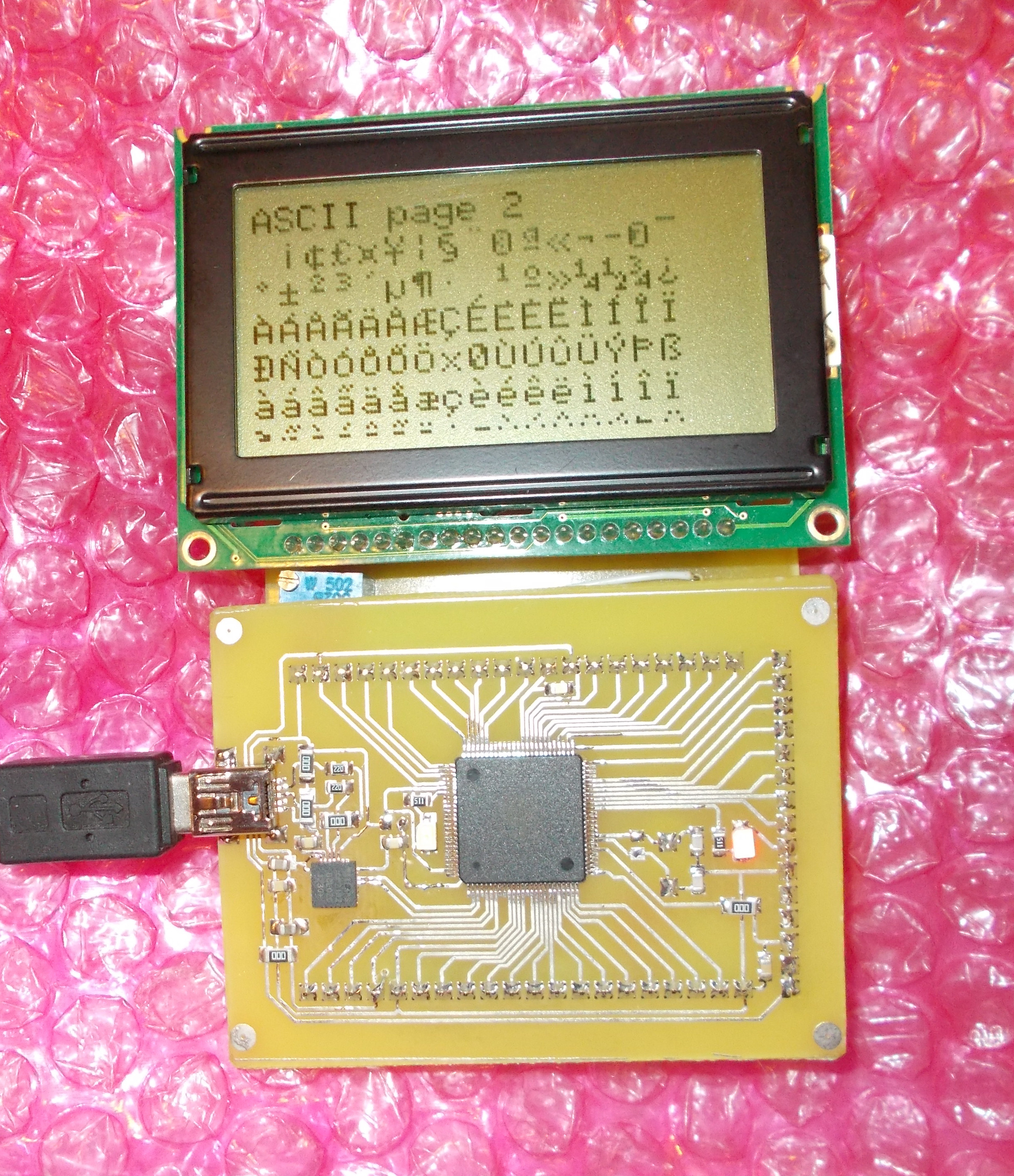
Вот решил Arduino собрать на ATmega2560, вот что получилось.
p.s. Плата переходник для подключения WG12864B
U8GLIB_KS0108_128 u8g(22,23,24,25,26,27,28,29,34,30,39,33,32,31);
// 8Bit Com: D0..D7: 8,9,10,11,4,5,6,7 en=18, cs1=14, cs2=15,di=17,rw=16,rst=31
Тест программка.
#include <openGLCD.h>
void setup()
{
GLCD.Init();
GLCD.SelectFont(System5x7);
GLCD.ClearScreen();
pinMode(A15, OUTPUT);
pinMode(44, OUTPUT);
digitalWrite(44, HIGH);
digitalWrite(A15,HIGH);
}
byte pos = 0;
byte r;
void loop()
{
while(1) {
GLCD.ClearScreen();
for(byte x=0;x<11;x++) {
r = random(1,63);
if (pos==0) {
Bar(pos,0,10,r);
}
else {
Bar(pos+(x*2),0,10,r);
}
pos=pos+10;
}
delay(200);
pos =0;
}
}
void Bar(int x,int y, int w, int h) {
GLCD.FillRect(x,63-h,w,h,BLACK);
}
void setup()
{
GLCD.Init();
GLCD.SelectFont(System5x7);
GLCD.ClearScreen();
pinMode(A15, OUTPUT);
pinMode(44, OUTPUT);
digitalWrite(44, HIGH);
digitalWrite(A15,HIGH);
}
byte pos = 0;
byte r;
void loop()
{
while(1) {
GLCD.ClearScreen();
for(byte x=0;x<11;x++) {
r = random(1,63);
if (pos==0) {
Bar(pos,0,10,r);
}
else {
Bar(pos+(x*2),0,10,r);
}
pos=pos+10;
}
delay(200);
pos =0;
}
}
void Bar(int x,int y, int w, int h) {
GLCD.FillRect(x,63-h,w,h,BLACK);
}
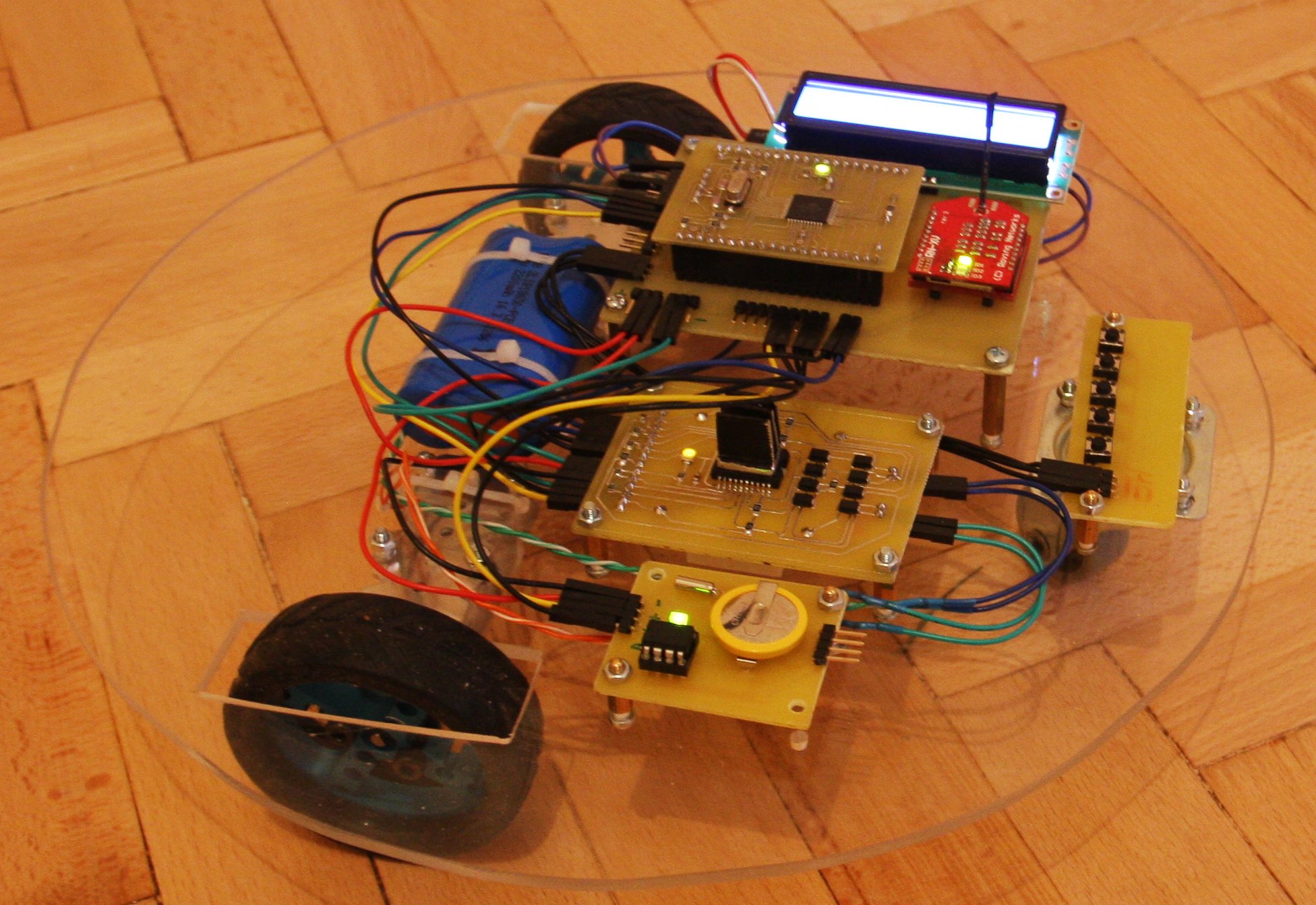
Робот Пылесос своими руками
- ATmega 1284P
- L298P
- DS1307 Real Time Clock
- LCD Display
- RN-XV WiFly модуль
- Двигатели и колеса Makeblock
И так, вот фотки того что получилось:
На видео показано как робот и определяет препятствия посредством считывания показаний потребление тока двигателями.
Драйвер мотора установлен L298P – мы читаем показание Sense A и B и в зависимости от этого принимаем решения двигаться вперед или разворачиваться.