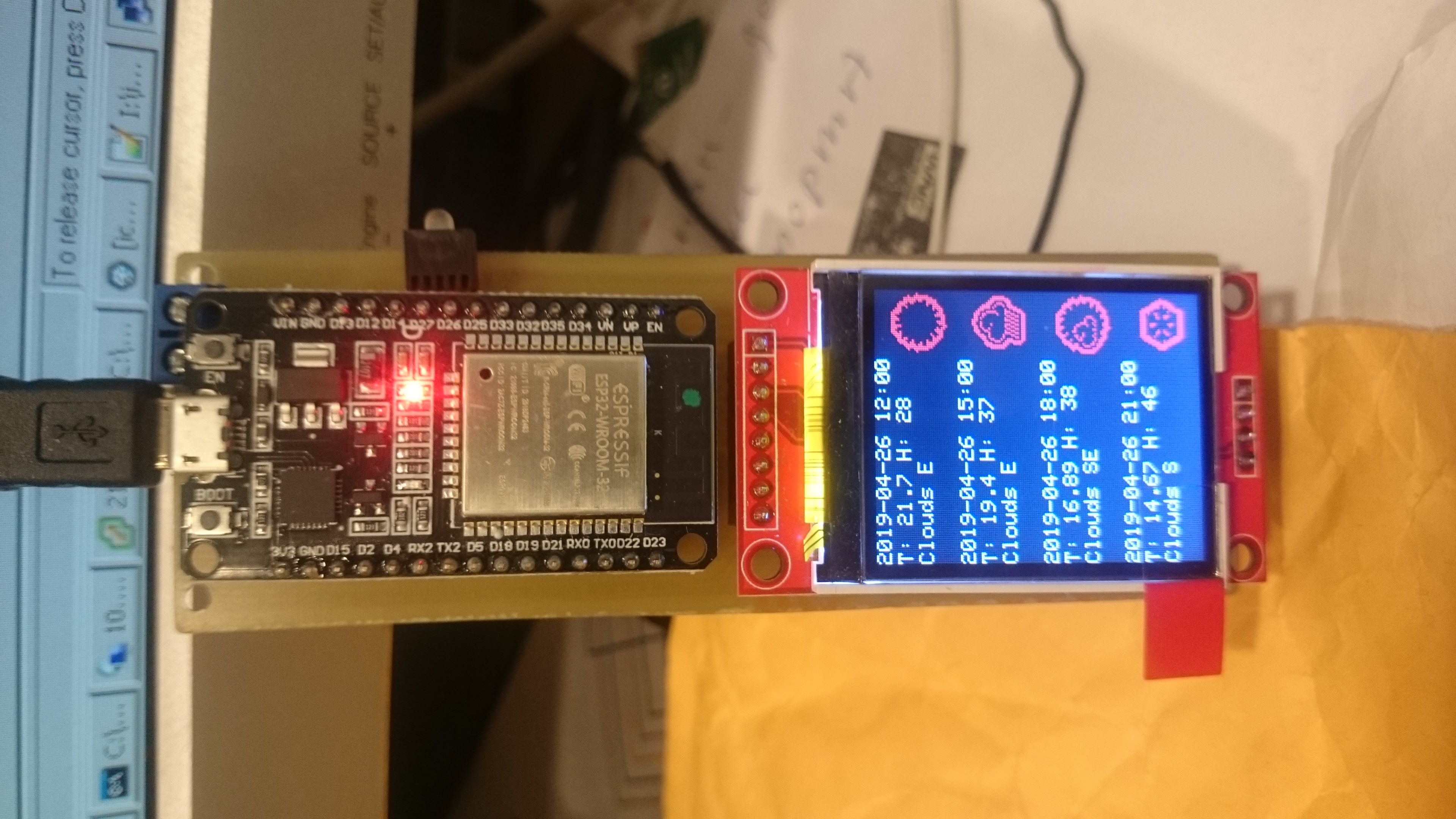
Погоду можно брать тут https://openweathermap.org
Все для создания Роботов и не только. Умный дом, Tasmota, MQTT, Home Assistant.
Погоду можно брать тут https://openweathermap.org
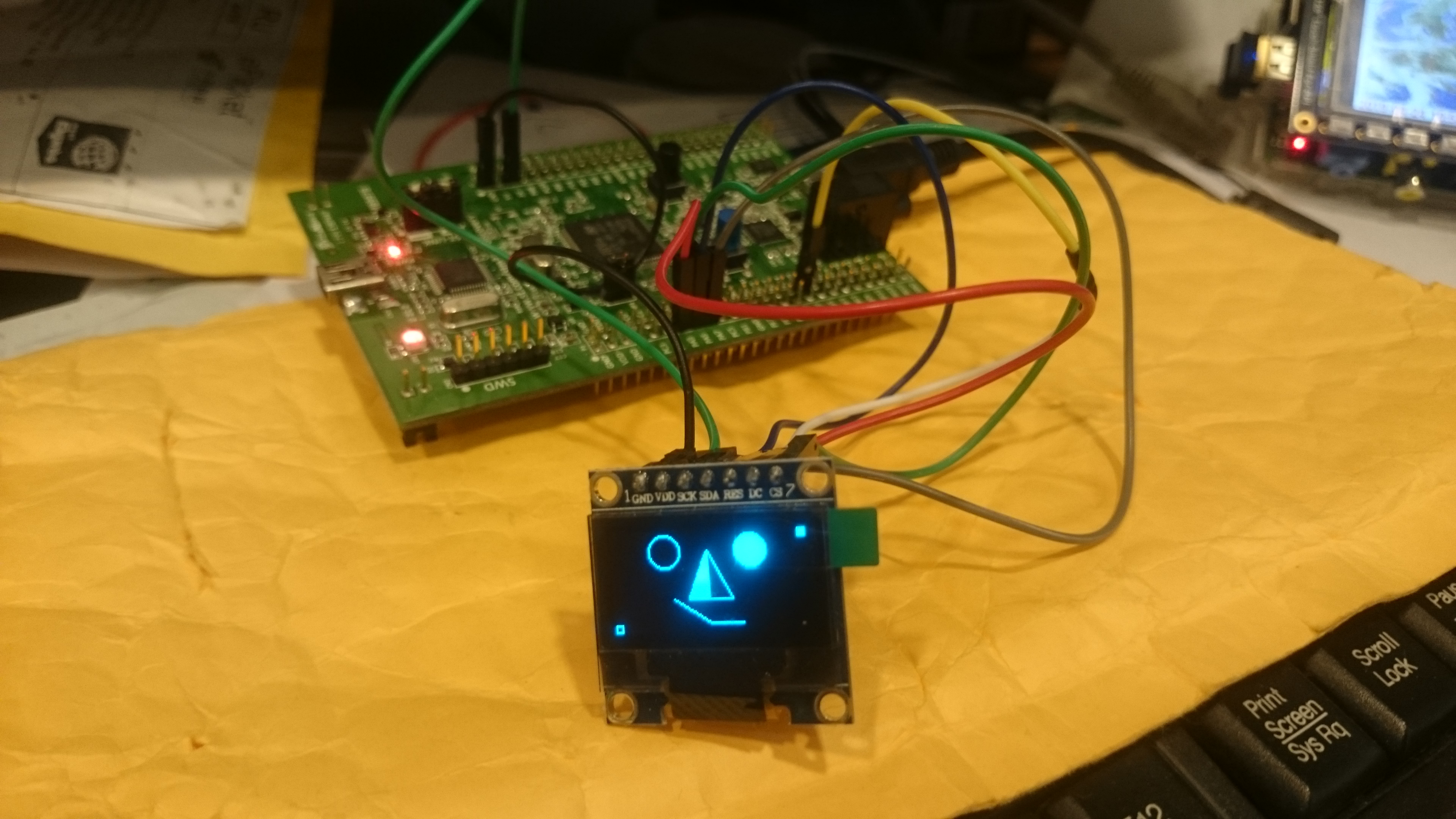
Library and test: https://github.com/elfnor/micropython-blog-examples/tree/master/oled
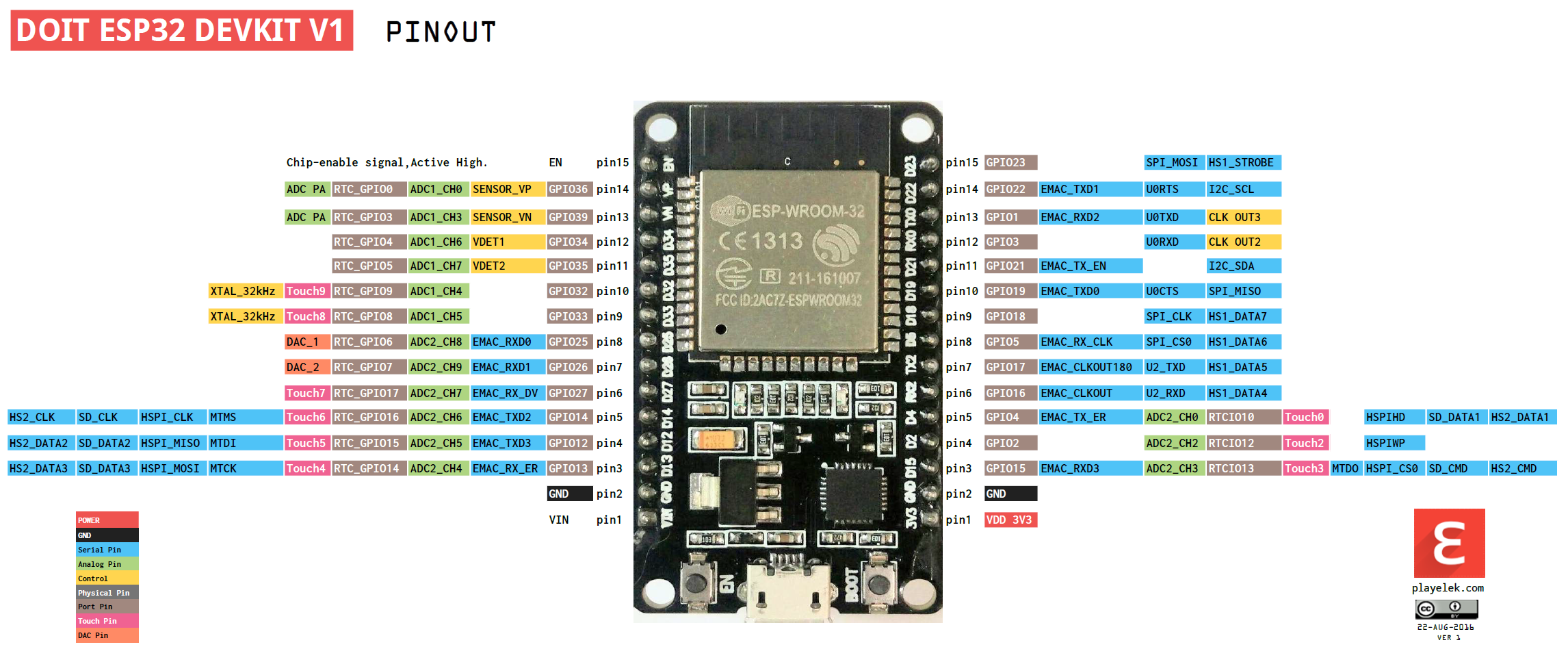
Все работает. Только для того чтобы в этот модуль загрузить MicroPython
нужно держать кнопку boot. uPyCraft очень глючная программа, так и не смог ее побороть. Для редактирования использую rshell. https://github.com/dhylands/rshell
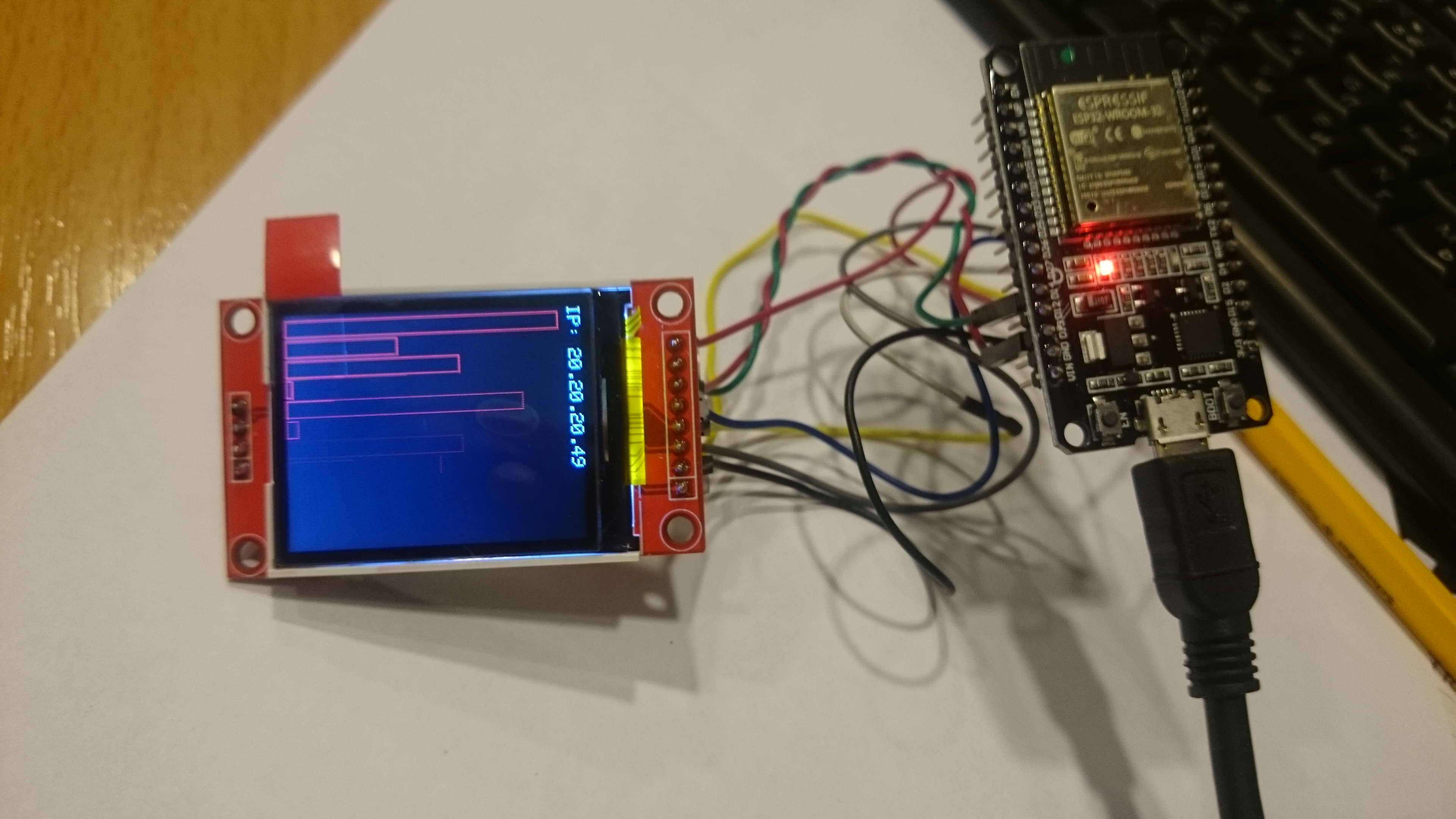
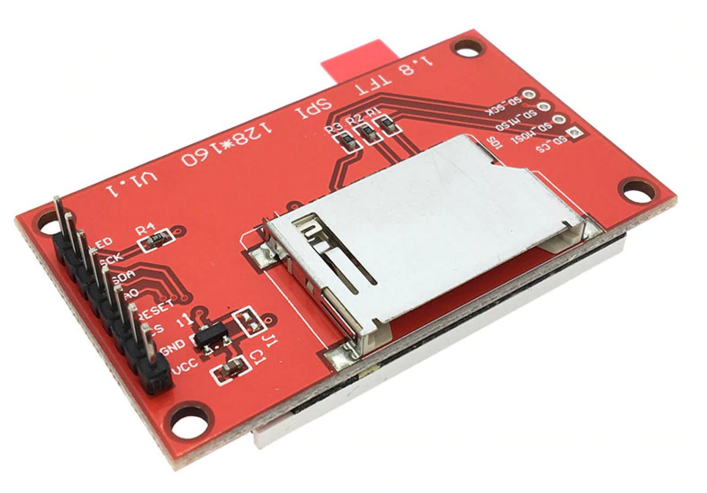
Библиотека для ST7735 – https://github.com/boochow/MicroPython-ST7735
Библиотека тут: https://github.com/micropython/micropython/tree/master/drivers/sdcard
Подключили на SPI2 (CS, SCK, MISO, MOSI) = (Y5, Y6, Y7, Y8) = (PB12, PB13, PB14, PB15)
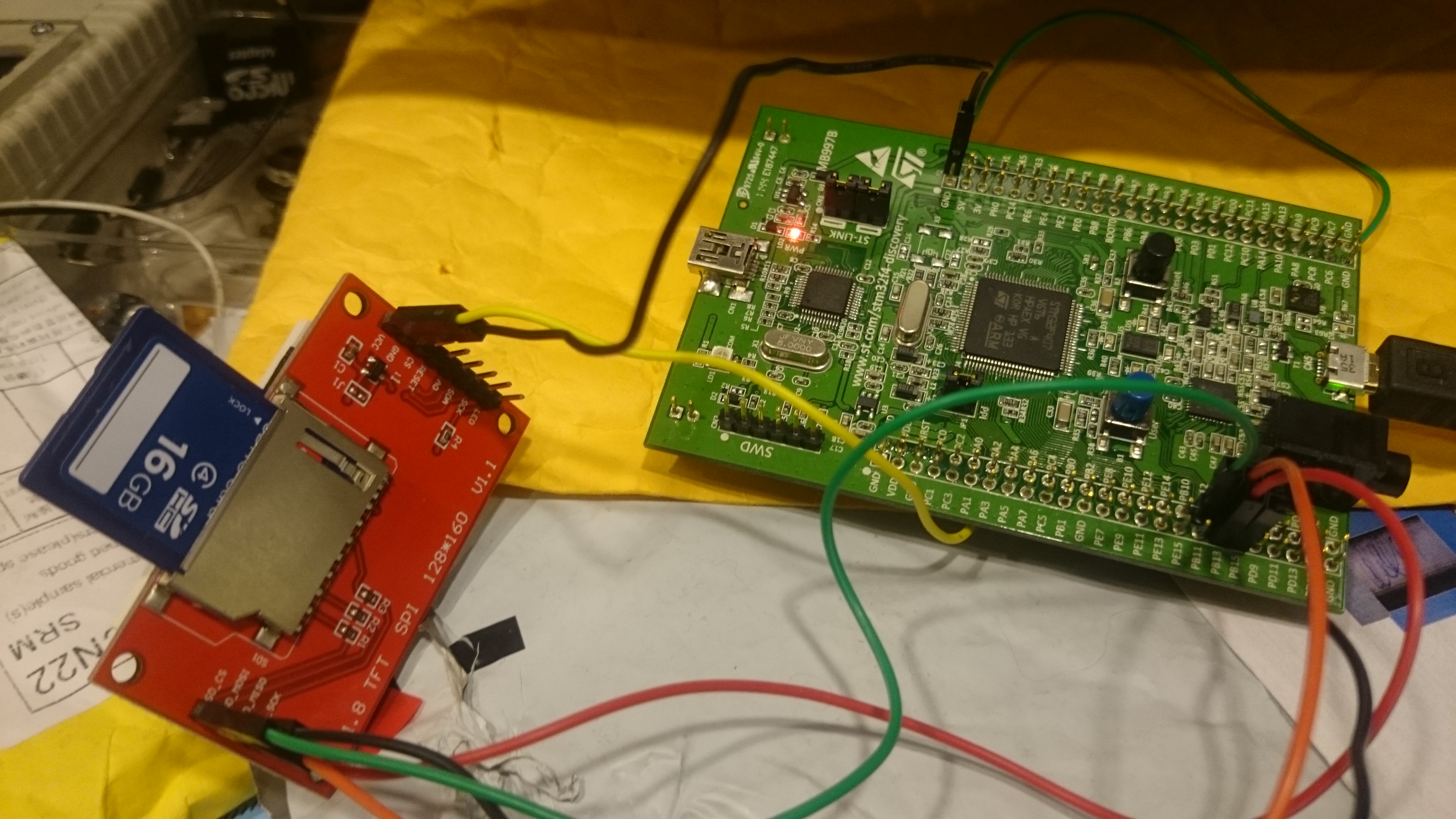
Модуль 1.8 inch SPI TFT LCD Display Module ST7735 128×160 (Aliexpress)