- ATmega 1284P
- L298P
- DS1307 Real Time Clock
- LCD Display
- RN-XV WiFly модуль
- Двигатели и колеса Makeblock
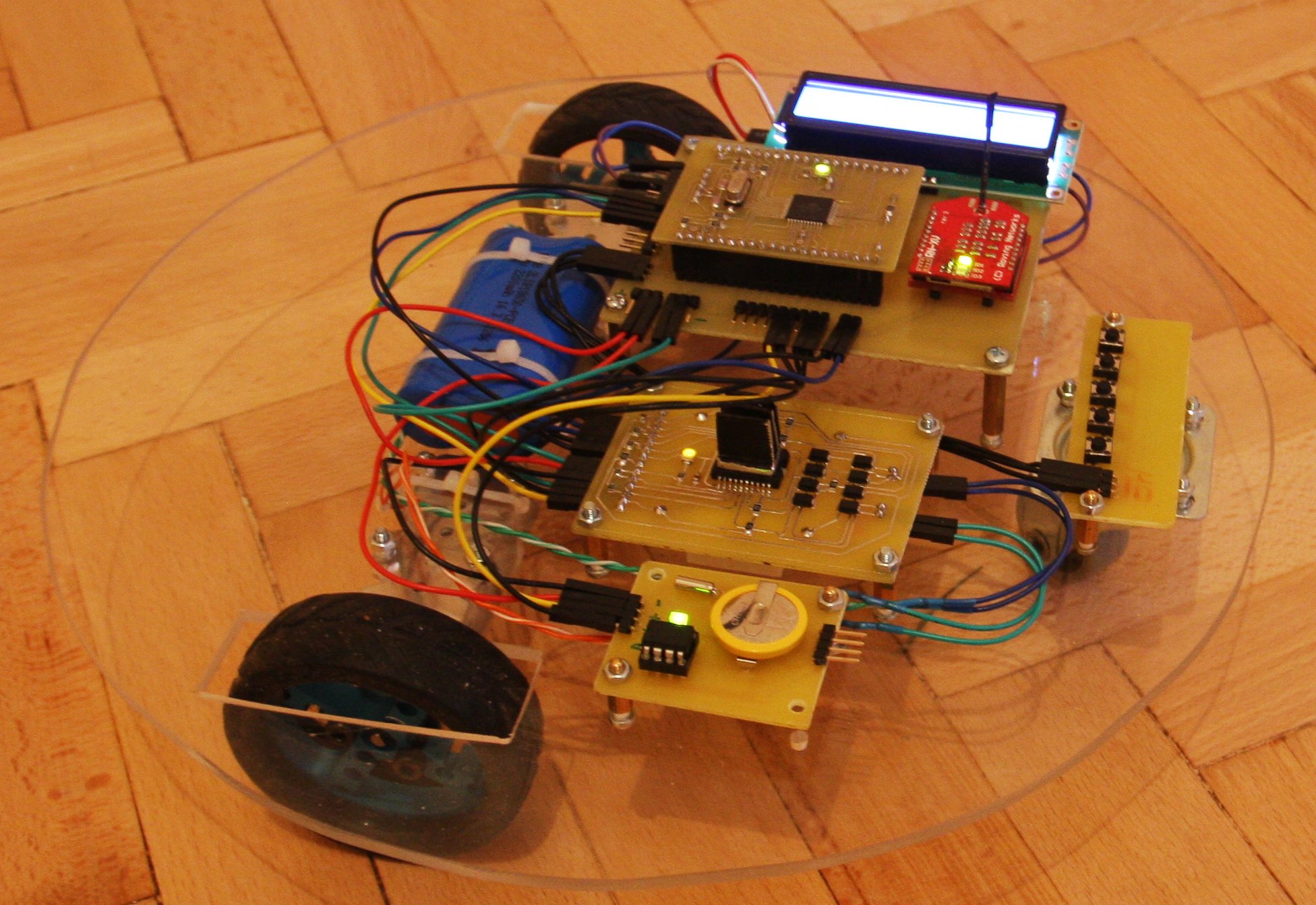
И так, вот фотки того что получилось:
На видео показано как робот и определяет препятствия посредством считывания показаний потребление тока двигателями.
Драйвер мотора установлен L298P – мы читаем показание Sense A и B и в зависимости от этого принимаем решения двигаться вперед или разворачиваться.