http://jbvsblog.blogspot.ru/2013/09/pcduino-extends-to-4-uarts.html

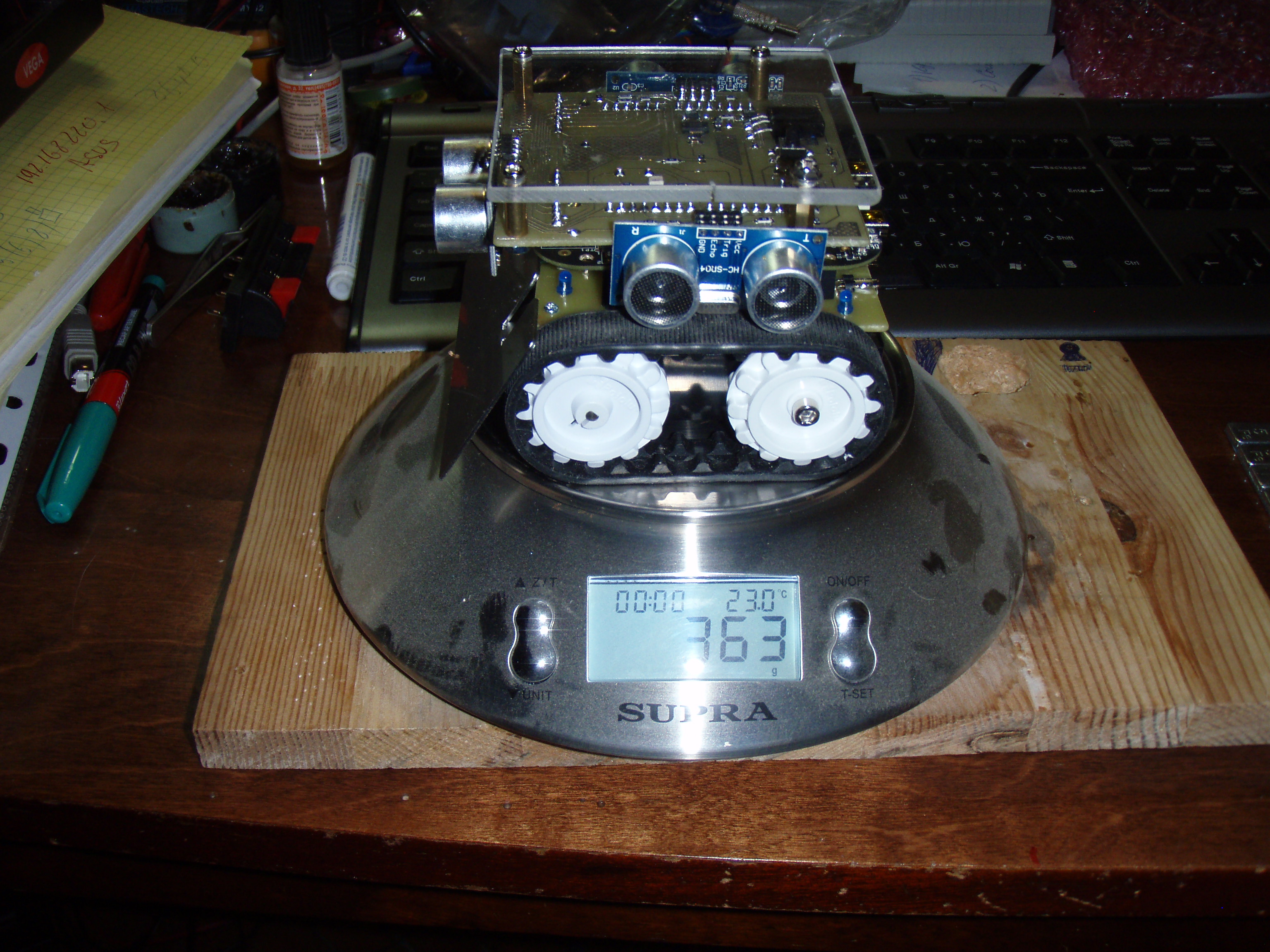
Все для создания Роботов и не только. Умный дом, Tasmota, MQTT, Home Assistant.
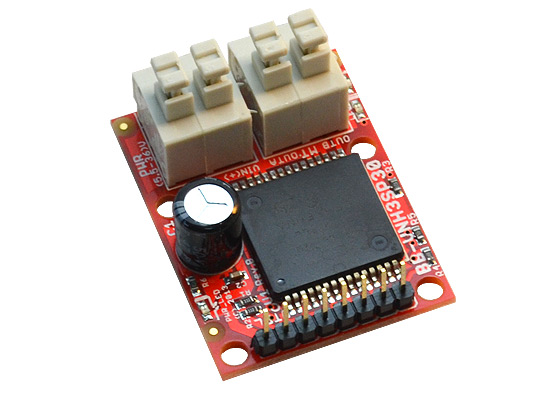
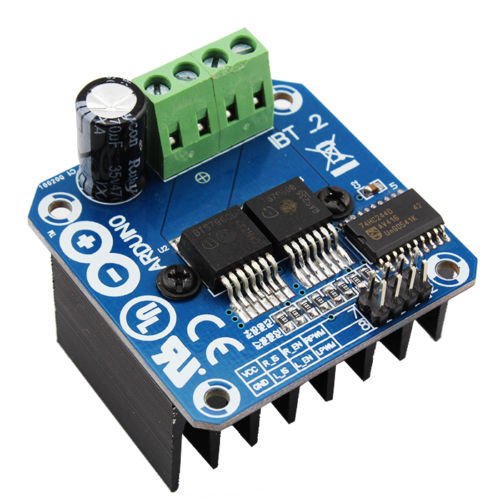
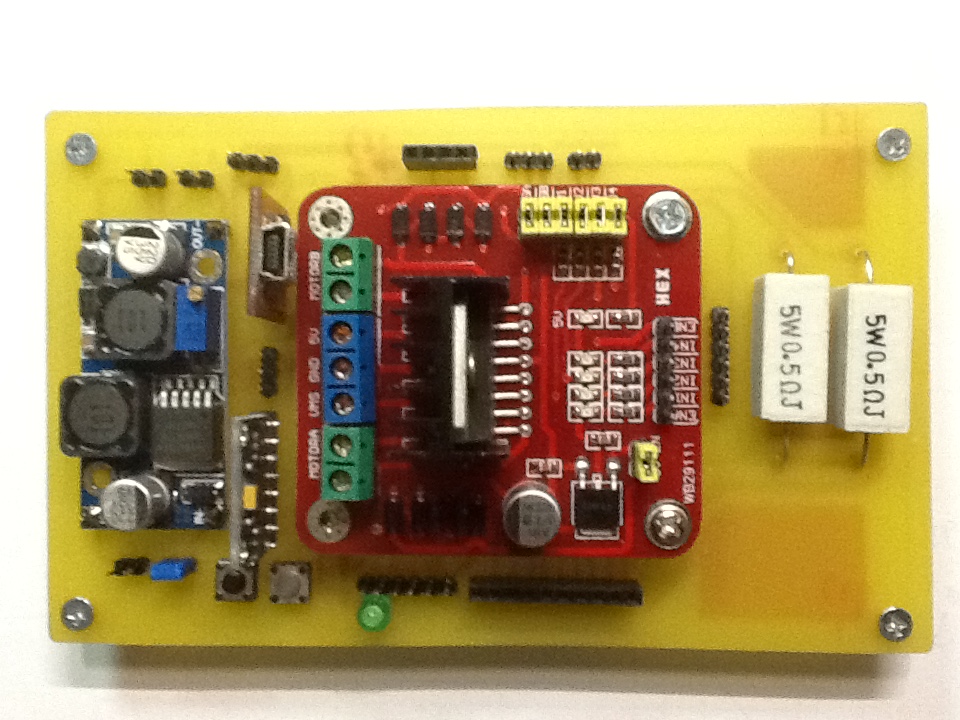
– Нагрузка до 30А;
– Напряжение питания 5.5-36В;
– LED индикатор состояния ШИМ;
– LED индикатор состояния направления;
|---------------------------------------------------------------------------|
| The hardware connections are as follows: |
|--------------------------------|------------------------------------------|
| Connector at Olimexino-328 | Connector at BB-VNH3SP30 |
|--------------------------------|------------------------------------------|
| Not connected! | CTRL<1>, VIN |
| Power<3>, 5V | CTRL<2>, +5V |
| Power<4>, GND | CTRL<3>, GND |
| Digital<9> | CTRL<4>, INA |
| Digital<13> | CTRL<5>, INB |
| Digital<11> | CTRL<6>, PWM |
| Digital<10> | CTRL<7>, ENA/DIAGA |
| Digital<12> | CTRL<8>, ENB/DIAGB |
|--------------------------------|------------------------------------------|
// ATmega 168P (Arduino) L298 и 74hc00
struct MOTOR
{
int in; // INVERTOR INPUT
int enable; // ENABLE
};
MOTOR MOTOR1 = { 7, 5 }; // D5-PWM, D7-Direction
MOTOR MOTOR2 = { 8, 6 }; // D6-PWM, D8-Direction
int FORWARD = HIGH;
int BACK = LOW;
void setup()
{
pinMode(MOTOR1.in, OUTPUT);
pinMode(MOTOR2.in, OUTPUT);
}
void loop()
{
motor1(FORWARD, 50);
motor2(FORWARD, 50);
delay(3000);
motor1(BACK, 100);
motor2(BACK, 100);
delay(5000);
}
void motor1(int dir, int pwm)
{
digitalWrite(MOTOR1.in, dir);
analogWrite(MOTOR1.enable, pwm);
}
void motor2(int dir, int pwm)
{
digitalWrite(MOTOR2.in, dir);
analogWrite(MOTOR2.enable, pwm);
}