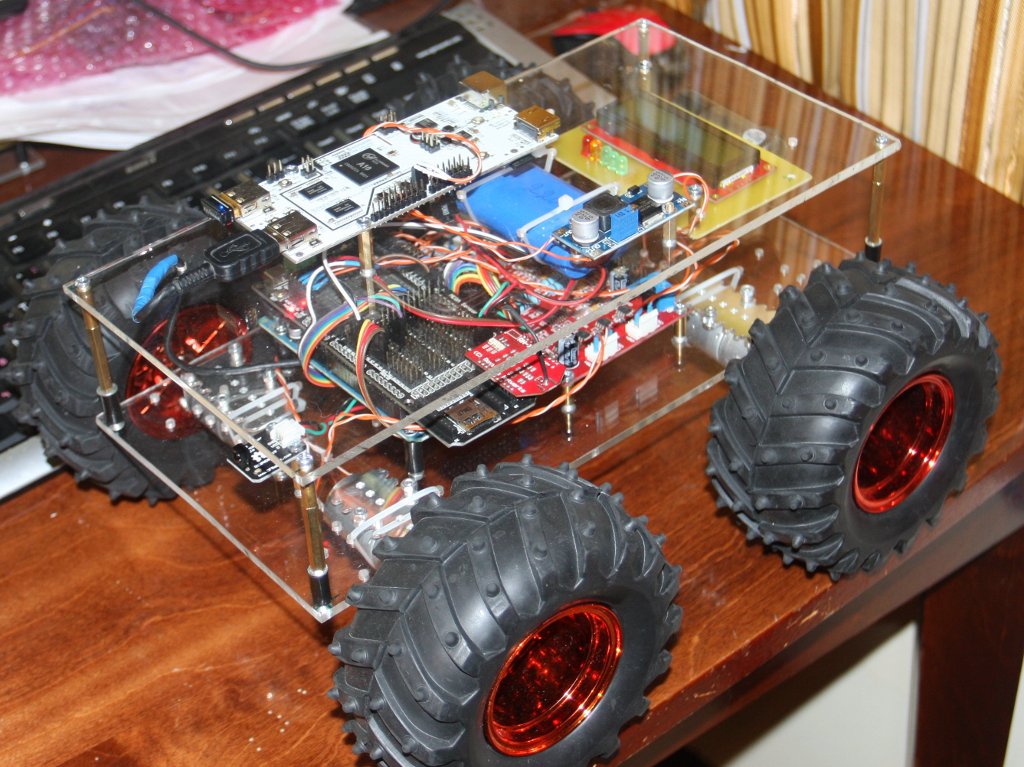
Вот окончательная версия шасcи для Робота пылесоса. Осталось придумать как сделать сам пылесос.
Все для создания Роботов и не только. Умный дом, Tasmota, MQTT, Home Assistant.
Вот окончательная версия шасcи для Робота пылесоса. Осталось придумать как сделать сам пылесос.
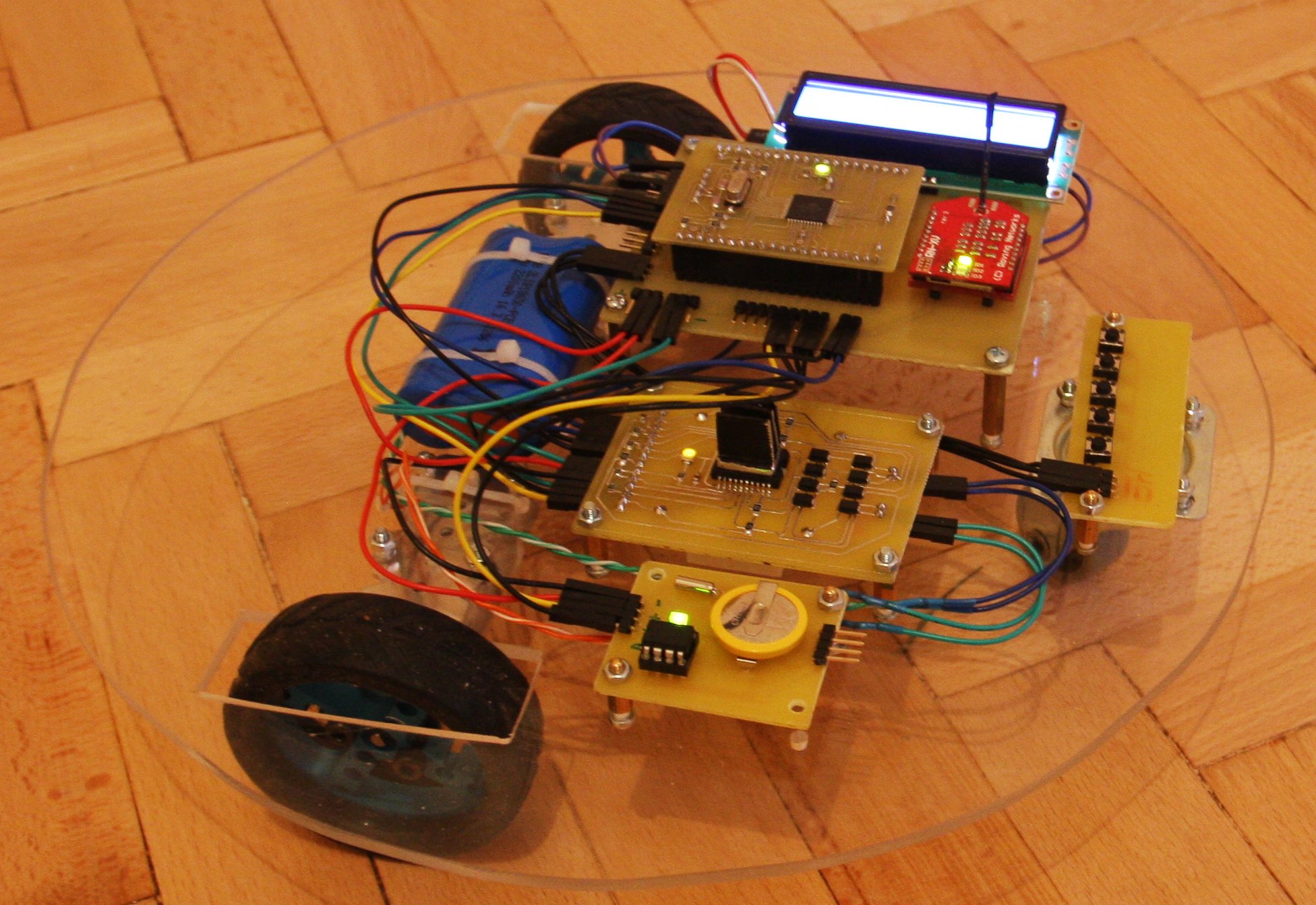
Учебно-тренировочный робот для изучения совместной работы Arduino Mega 2560 и pcDuino.
Основной блок управления двигателями и другими датчиками собран на Arduino Mega 2560. Для обработки видео используется pcDuino. Внизу есть фото с диограмой всего робота. Робот управляется через WWW, Telnet или при помощи IR (Инфокрасный пульт управления). pcDuino доступна через WiFi — через USB WiFi Edimax. Доступ к Arduino Mega тоже возможен через WiFi — для этого использовали модуль WiFly от SparkFun. pcDuino и Arduino Mega общаются между сабой через UART или через WiFi.
— Сейчас работает трансляция с камеры (можно в режиме реального времени смотреть все то что видит робот)








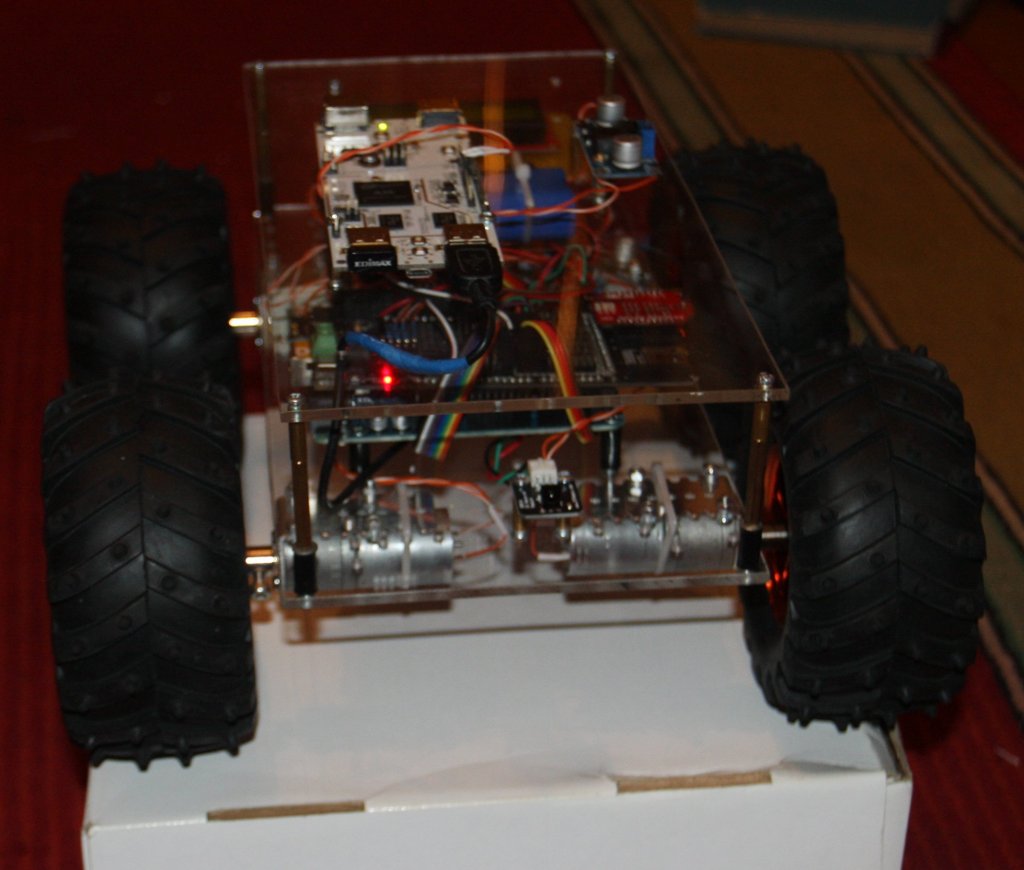
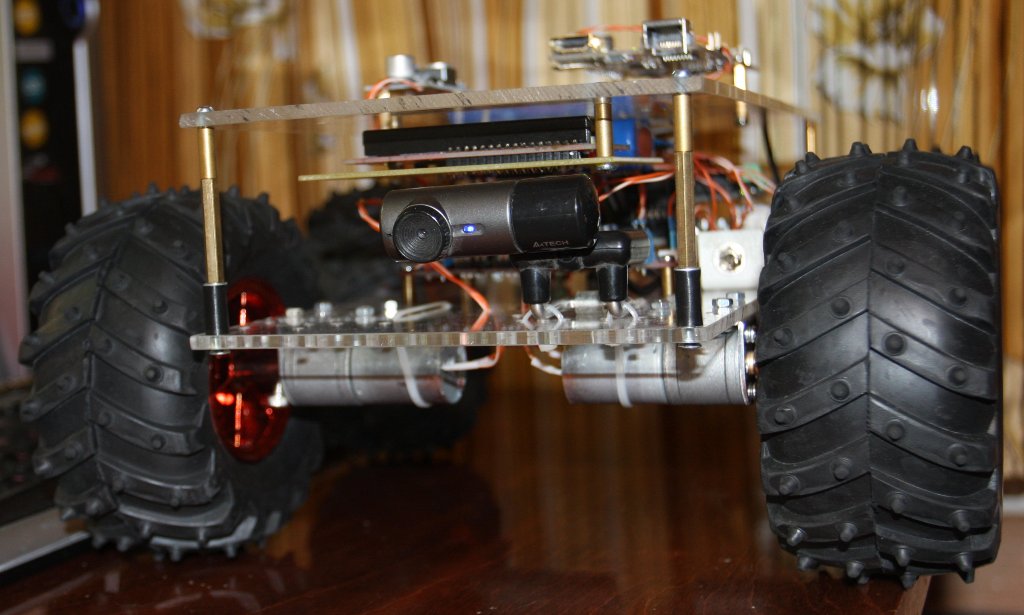
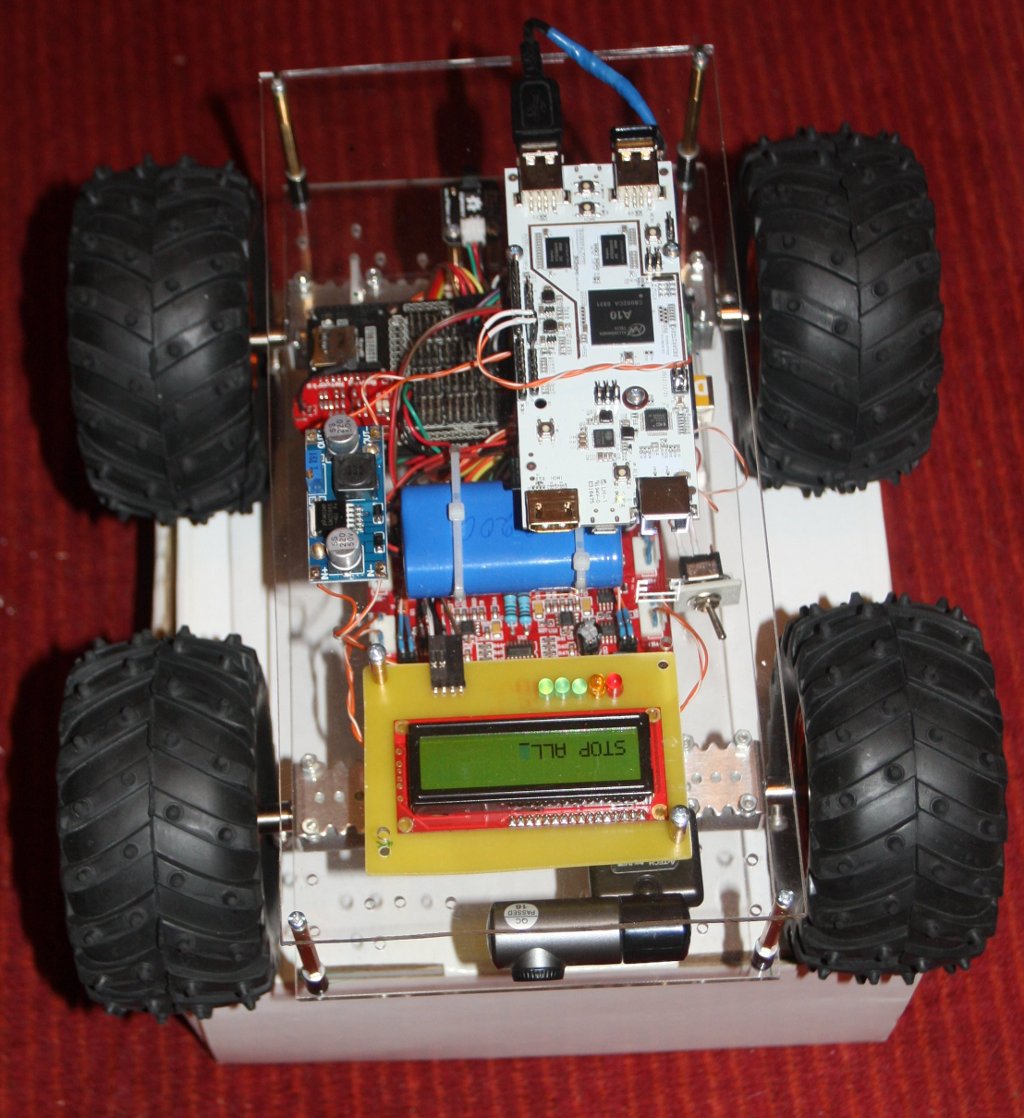
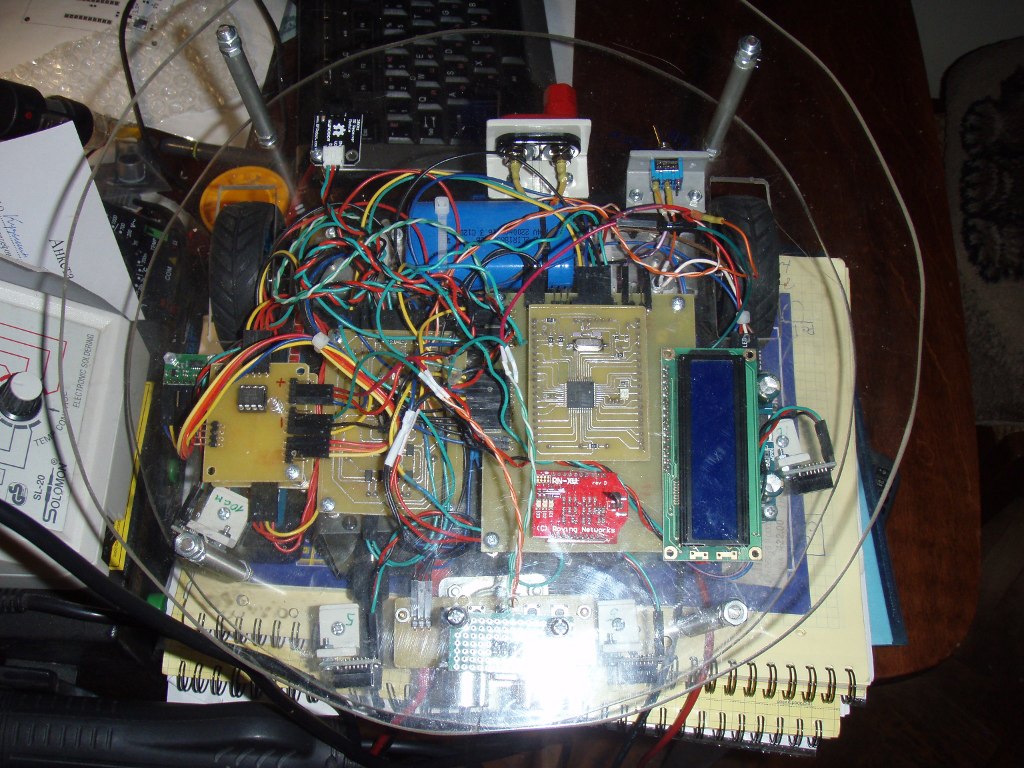
И так, вот фотки того что получилось:
На видео показано как робот и определяет препятствия посредством считывания показаний потребление тока двигателями.
Драйвер мотора установлен L298P – мы читаем показание Sense A и B и в зависимости от этого принимаем решения двигаться вперед или разворачиваться.