
Понижающий-повышающий импульсный стабилизатор SEPIC структура.
- Uвх = 3…35 В,
- Uвых = 1.25…30 В,
- Iвых = 2 А (макс.),
- 48х23х14мм,
- 50кГц
- Купить
Все о мобильной энергии.
Все для создания Роботов и не только. Умный дом, Tasmota, MQTT, Home Assistant.
Понижающий-повышающий импульсный стабилизатор SEPIC структура.
Все о мобильной энергии.
Library for Arduino 1.0.3
LCD_Library
Library for Arduino 1.05
При инициализации экрана необходимы вот эти строчки.
lcd.init(EPSON);
lcd.contrast(44);
ColorLCDShield
Для AtMega 1284p *.h #else #define LCD_PIN_RES 2 // 26 // D8 #define LCD_PIN_CS 3 // 27 // D9 #define LCD_PIN_DIO 5 // D11 #define LCD_PIN_SCK 7 // D13 #define LCD_PORT_CS PORTA #define LCD_PORT_SCK PORTB #define LCD_PORT_RES PORTA #define LCD_PORT_DIO PORTB #endif И вот это в *.cpp DDRB = ((1<<LCD_PIN_DIO)|(1<<LCD_PIN_SCK)); DDRA = ((1<<LCD_PIN_CS)|(1<<LCD_PIN_RES));
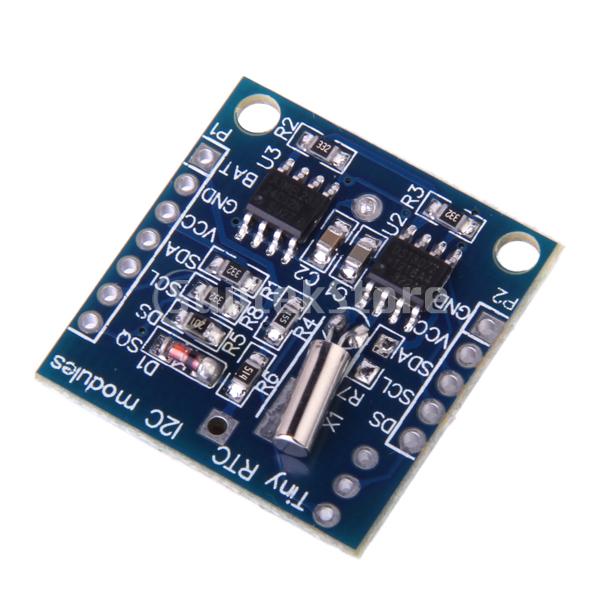
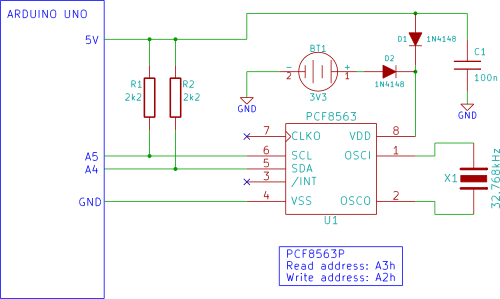
В данном модуле должна быть установлена НЕ БАТАРЕЙКА а аккумулятор LIR2032 3.6v, в противном случаи часы не будут сохраняться после отключения питания. Короче барахло китайское.
Источник: http://startingelectronics.com/beginners/start-electronics-now/tut16-arduino-clock/
Описания программирования для Arduino:
http://tronixstuff.com/2013/08/13/tutorial-arduino-and-pcf8563-real-time-clock-ic/

Пример:
// ---------------------------------------------------------------------------
// This example code was used to successfully communicate with 15 ultrasonic sensors. You can adjust
// the number of sensors in your project by changing SONAR_NUM and the number of NewPing objects in the
// "sonar" array. You also need to change the pins for each sensor for the NewPing objects. Each sensor
// is pinged at 33ms intervals. So, one cycle of all sensors takes 495ms (33 * 15 = 495ms). The results
// are sent to the "oneSensorCycle" function which currently just displays the distance data. Your project
// would normally process the sensor results in this function (for example, decide if a robot needs to
// turn and call the turn function). Keep in mind this example is event-driven. Your complete sketch needs
// to be written so there's no "delay" commands and the loop() cycles at faster than a 33ms rate. If other
// processes take longer than 33ms, you'll need to increase PING_INTERVAL so it doesn't get behind.
// ---------------------------------------------------------------------------
#include "NewPing.h"
#define SONAR_NUM 8 // Number or sensors.
#define MAX_DISTANCE 200 // Maximum distance (in cm) to ping.
#define PING_INTERVAL 33 // Milliseconds between sensor pings (29ms is about the min to avoid cross-sensor echo).
unsigned long pingTimer[SONAR_NUM]; // Holds the times when the next ping should happen for each sensor.
unsigned int cm[SONAR_NUM]; // Where the ping distances are stored.
uint8_t currentSensor = 0; // Keeps track of which sensor is active.
NewPing sonar[SONAR_NUM] = { // Sensor object array. Each sensor's trigger pin, echo pin, and max distance to ping.
NewPing(50, 51, MAX_DISTANCE), // 1
NewPing(52, 53, MAX_DISTANCE), // 2
NewPing(38, 37, MAX_DISTANCE), // 3
NewPing(40, 39, MAX_DISTANCE), // 4
NewPing(33, 34, MAX_DISTANCE), // 5
NewPing(35, 36, MAX_DISTANCE), // 6
NewPing(24, 25, MAX_DISTANCE), // 7
NewPing(26, 27, MAX_DISTANCE), // 8
};
void setup() {
Serial1.begin(115200);
pingTimer[0] = millis() + 75; // First ping starts at 75ms, gives time for the Arduino to chill before starting.
for (uint8_t i = 1; i < SONAR_NUM; i++) // Set the starting time for each sensor.
pingTimer[i] = pingTimer[i - 1] + PING_INTERVAL;
}
void loop() {
for (uint8_t i = 0; i < SONAR_NUM; i++) { // Loop through all the sensors.
if (millis() >= pingTimer[i]) { // Is it this sensor's time to ping?
pingTimer[i] += PING_INTERVAL * SONAR_NUM; // Set next time this sensor will be pinged.
if (i == 0 && currentSensor == SONAR_NUM - 1) oneSensorCycle(); // Sensor ping cycle complete, do something with the results.
sonar[currentSensor].timer_stop(); // Make sure previous timer is canceled before starting a new ping (insurance).
currentSensor = i; // Sensor being accessed.
cm[currentSensor] = 0; // Make distance zero in case there's no ping echo for this sensor.
sonar[currentSensor].ping_timer(echoCheck); // Do the ping (processing continues, interrupt will call echoCheck to look for echo).
}
}
// The rest of your code would go here.
}
void echoCheck() { // If ping received, set the sensor distance to array.
if (sonar[currentSensor].check_timer())
cm[currentSensor] = sonar[currentSensor].ping_result / US_ROUNDTRIP_CM;
}
void oneSensorCycle() { // Sensor ping cycle complete, do something with the results.
for (uint8_t i = 0; i < SONAR_NUM; i++) {
Serial1.print(i);
Serial1.print("=");
Serial1.print(cm[i]);
Serial1.print("cm ");
}
Serial1.println();
}