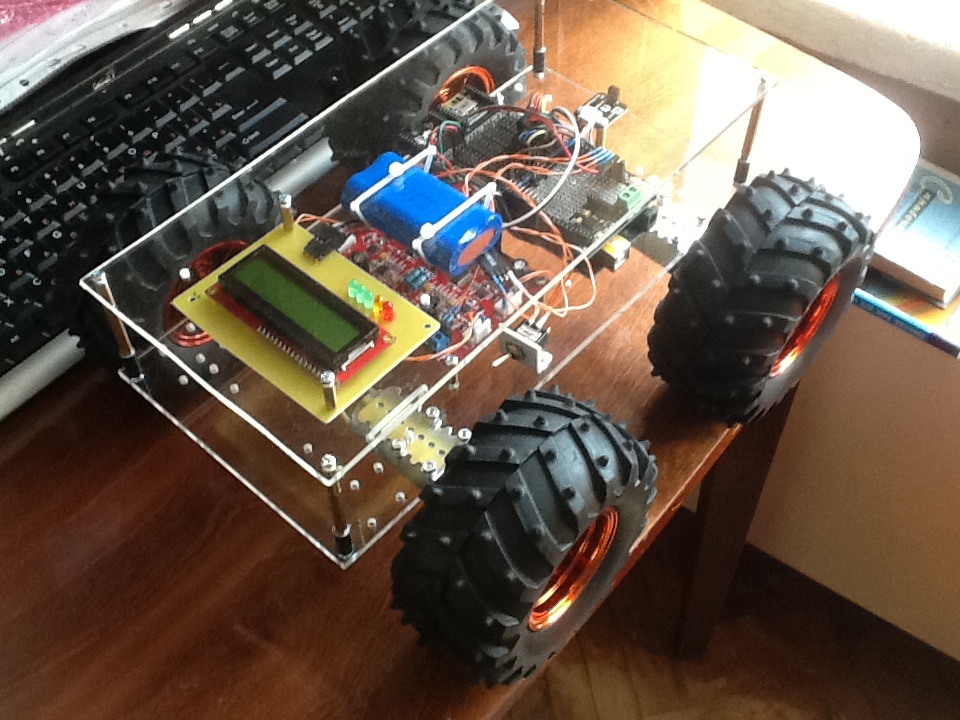
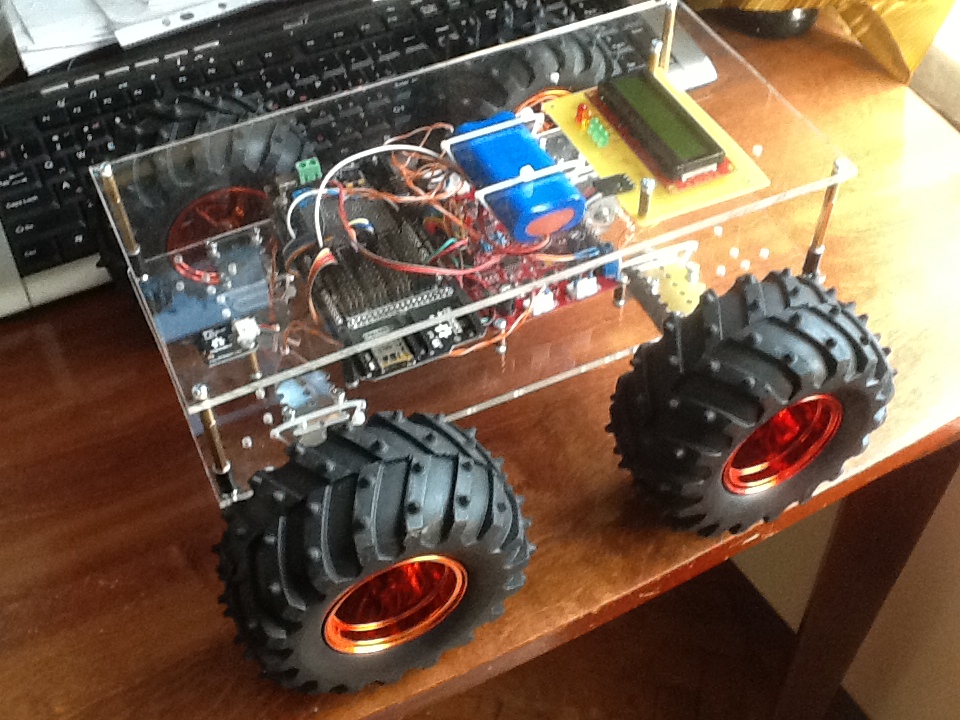
Это вторая версия платформы, заменили двигатели и немного пропорции, еще есть над чем поработать.
Все для создания Роботов и не только. Умный дом, Tasmota, MQTT, Home Assistant.
Это вторая версия платформы, заменили двигатели и немного пропорции, еще есть над чем поработать.
Начинаем собирать.
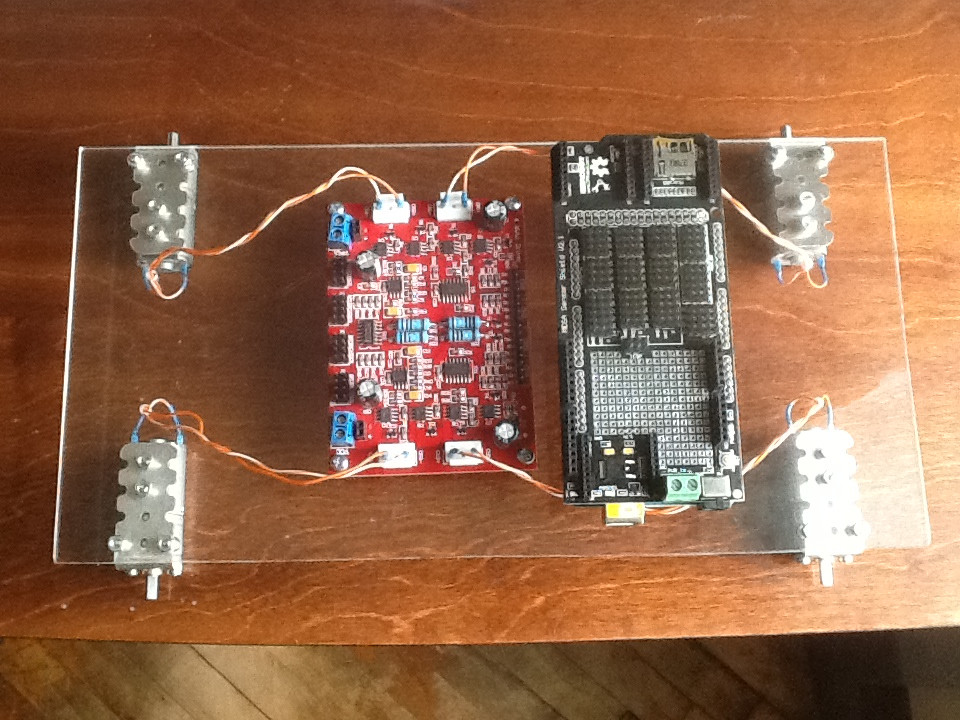
Вот что получилось.

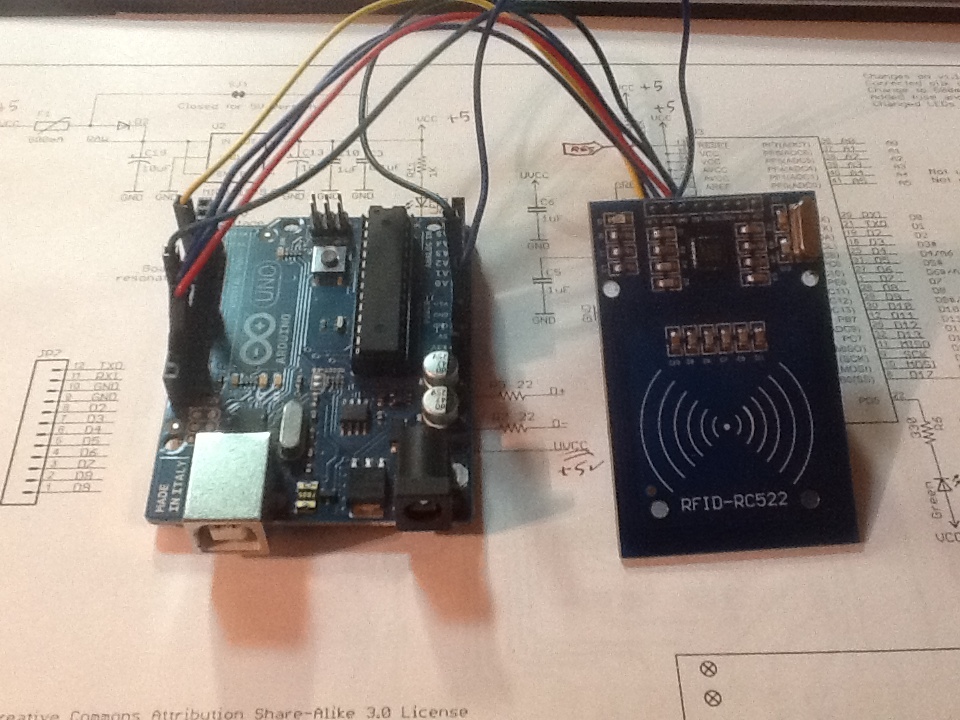
Код для начального понимания как все это работает: http://arduino.ru/forum/obshchii/pomogite-s-rfid-mifare-rc522-module
Описание стандартов:
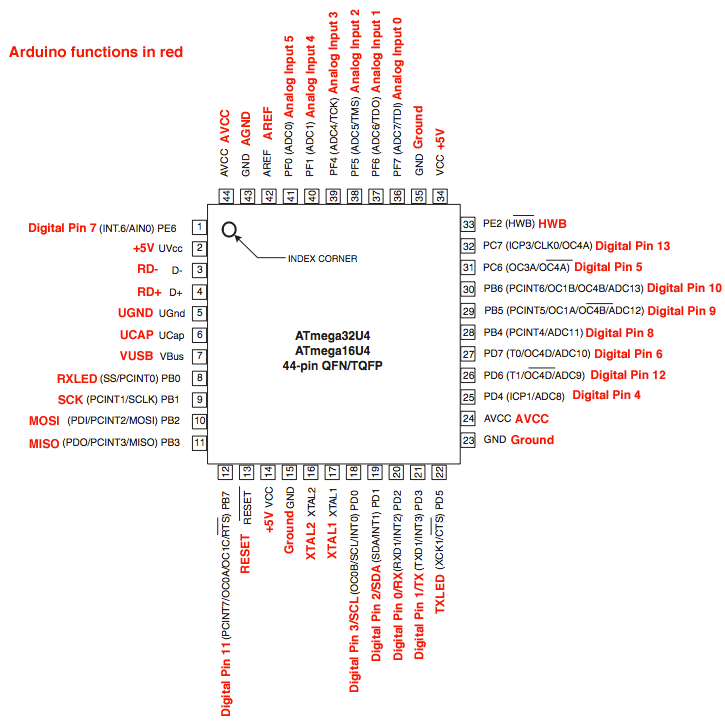
Вот решил сотворить себе Arduino Leonardo на ATmega32U4 – вот что получилось.
Все работает.
Схему взял тут: https://www.sparkfun.com/products/11098

Bootloader загружал через Arduino 1.0.5 (USBtinyISP)
Вот как видит его Ubuntu.
[181406.221727] tty_port_close_start: tty->count = 1 port count = 0.
[181406.336104] usb 2-2: USB disconnect, address 28
[181406.680048] usb 2-2: new full speed USB device using uhci_hcd and address 29
[181406.863091] cdc_acm 2-2:1.0: ttyACM0: USB ACM device
[181409.672104] usb 2-2: USB disconnect, address 29
[181409.912056] usb 2-2: new full speed USB device using uhci_hcd and address 30
[181410.092978] cdc_acm 2-2:1.0: This device cannot do calls on its own. It is not a modem.
[181410.093045] cdc_acm 2-2:1.0: ttyACM0: USB ACM device
[181410.101921] input: Arduino LLC Arduino Leonardo as /devices/pci0000:00/0000:00:1d.0/usb2/2-2/2-2:1.2/input/input16
[181410.102456] generic-usb 0003:2341:8036.000D: input,hidraw3: USB HID v1.01 Mouse [Arduino LLC Arduino Leonardo] on usb-0000:00:1d.0-2/input2
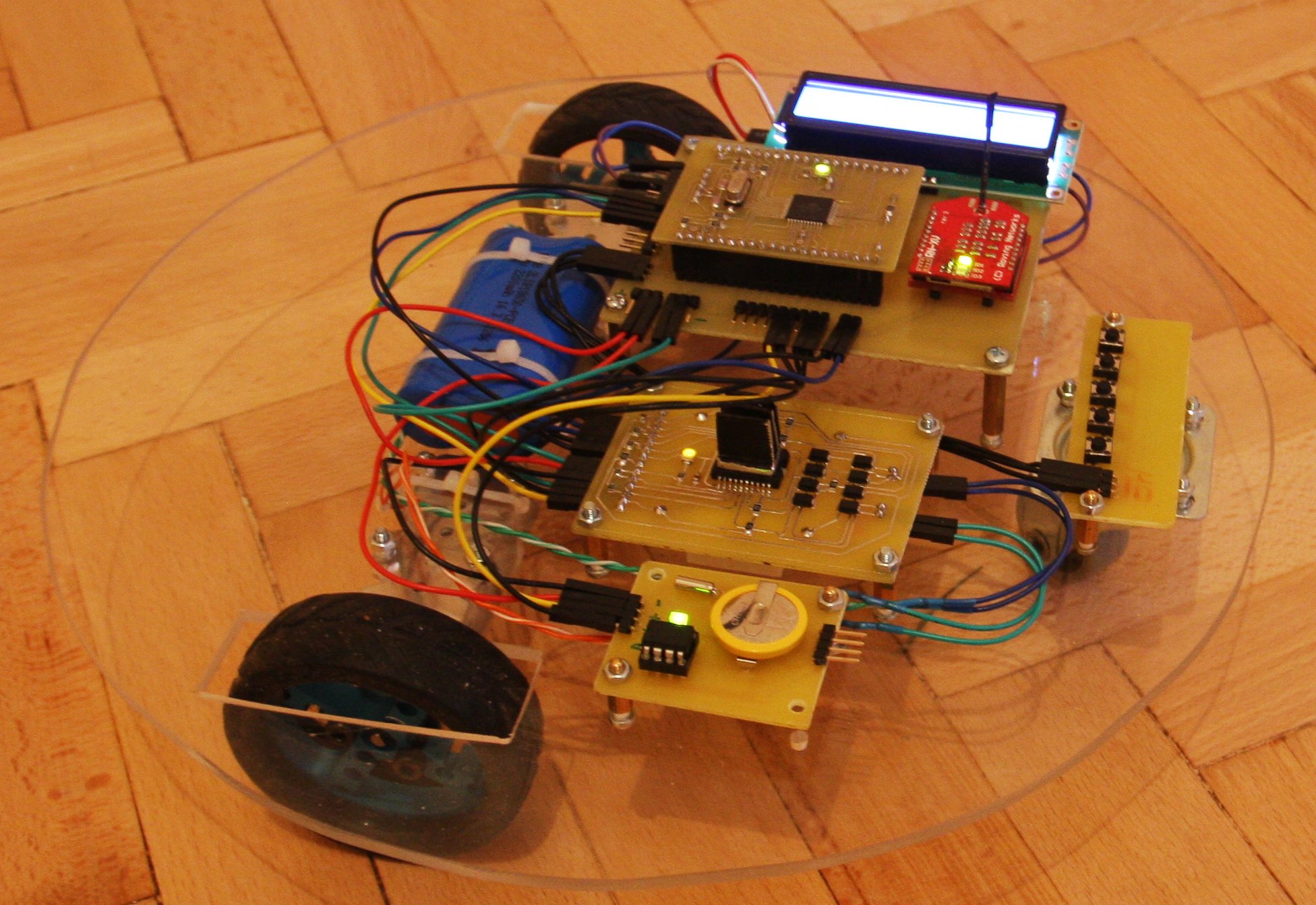
И так, вот фотки того что получилось:
На видео показано как робот и определяет препятствия посредством считывания показаний потребление тока двигателями.
Драйвер мотора установлен L298P – мы читаем показание Sense A и B и в зависимости от этого принимаем решения двигаться вперед или разворачиваться.