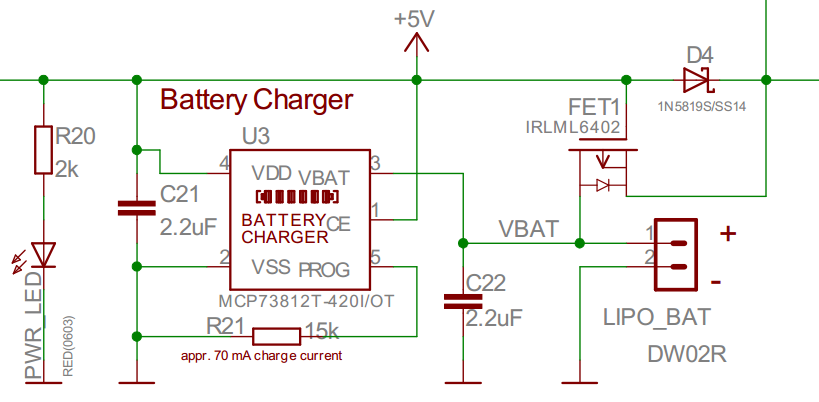

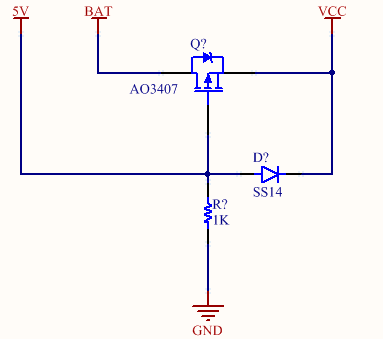
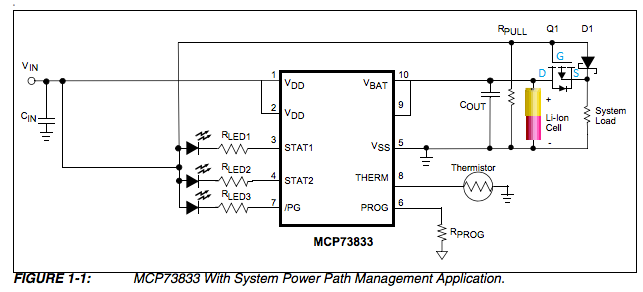
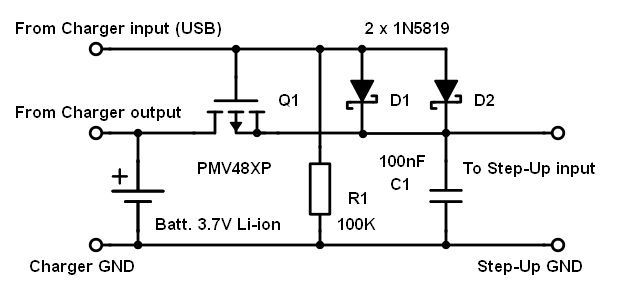
MCP7383X Li-Ion System Power Path Management Reference Design
http://li-ne.ru/page/shema-rezervnogo-pitanija-s-kontrollerom-zarjadki-liio-elementa-na-msr73831
Все для создания Роботов и не только. Умный дом, Tasmota, MQTT, Home Assistant.
http://www.hhhh.org/wiml/proj/nmeaxor.html
MTK NMEA checksum calculator on-line
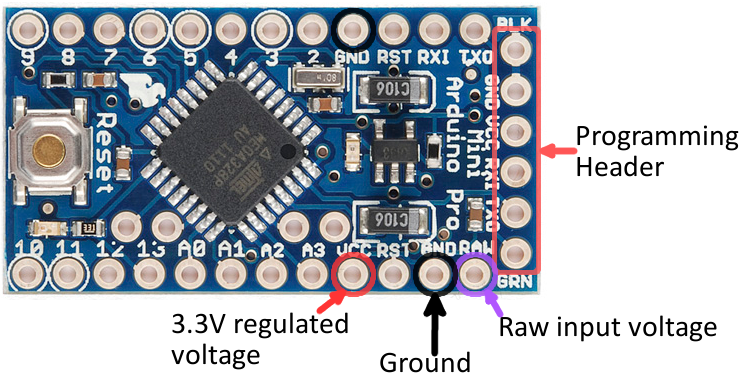
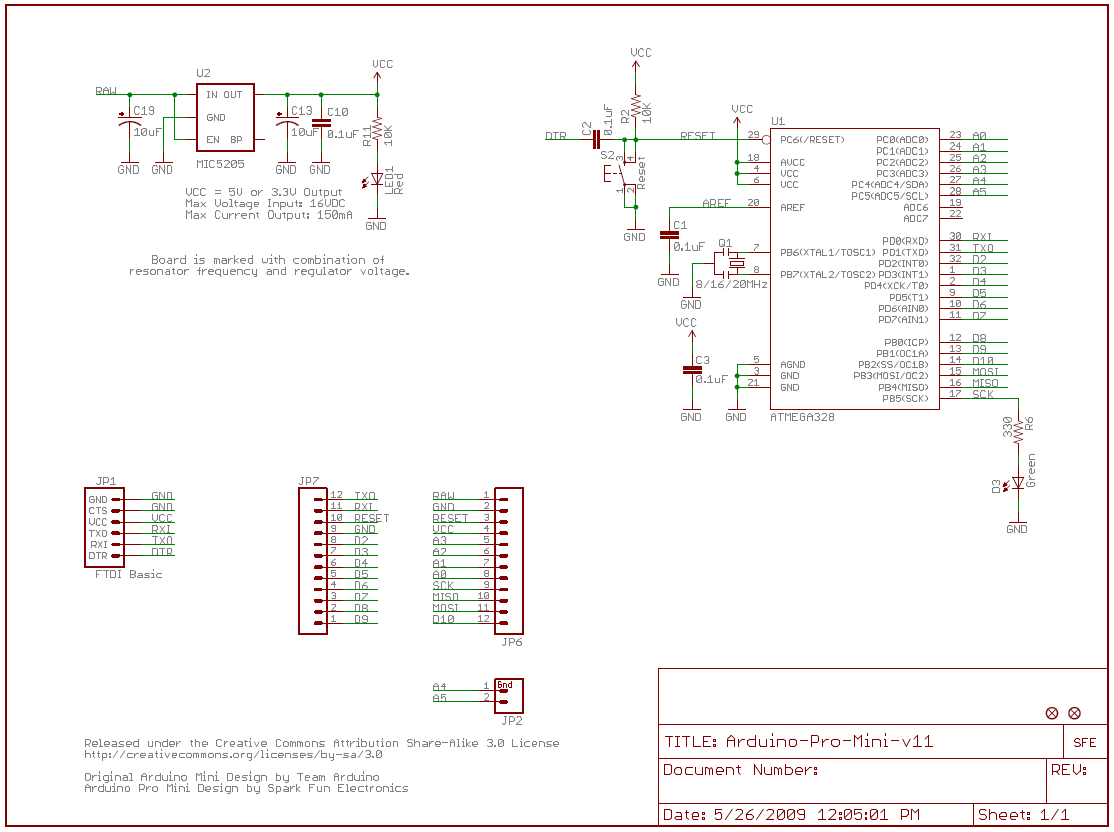
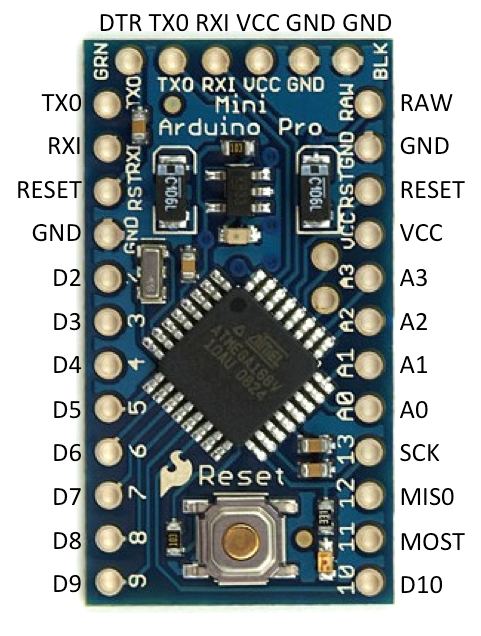
Using the Arduino Pro Mini 3.3V
|
|
 |
 |
 |
 |
Простое чтение данных.
#!/usr/bin/perl use GPS::NMEA; use Data::Dumper; my $gps = GPS::NMEA->new(Port => '/dev/cuaa0', # or COM5: or /dev/ttyS0 Baud => 4800); while(1) { $gps->parse; # Dump internal NMEA data: $gps->nmea_data_dump; # Alternative to look at the internal NMEA data: require Data::Dumper; print Data::Dumper->new([$gps->{NMEADATA}],[])->Indent(1)->Useqq(1)->Dump; }
Печатаем координаты.
#!/usr/bin/perl use GPS::NMEA; use Data::Dumper; my $gps = GPS::NMEA->new(Port => '/dev/cuaa0', # or COM5: or /dev/ttyS0 Baud => 4800); while(1) { $gps->parse; # Dump internal NMEA data: $gps->nmea_data_dump; # Alternative to look at the internal NMEA data: require Data::Dumper; print Data::Dumper->new([$gps->{NMEADATA}],[])->Indent(1)->Useqq(1)->Dump; }
Дамп всех NMEA данных с порта.
#!/usr/bin/perl use GPS::NMEA; use Data::Dumper; my $gps = GPS::NMEA->new(Port => '/dev/cuaa0', # or COM5: or /dev/ttyS0 Baud => 4800); while(1) { $gps->parse; # Dump internal NMEA data: $gps->nmea_data_dump; # Alternative to look at the internal NMEA data: require Data::Dumper; print Data::Dumper->new([$gps->{NMEADATA}],[])->Indent(1)->Useqq(1)->Dump; }
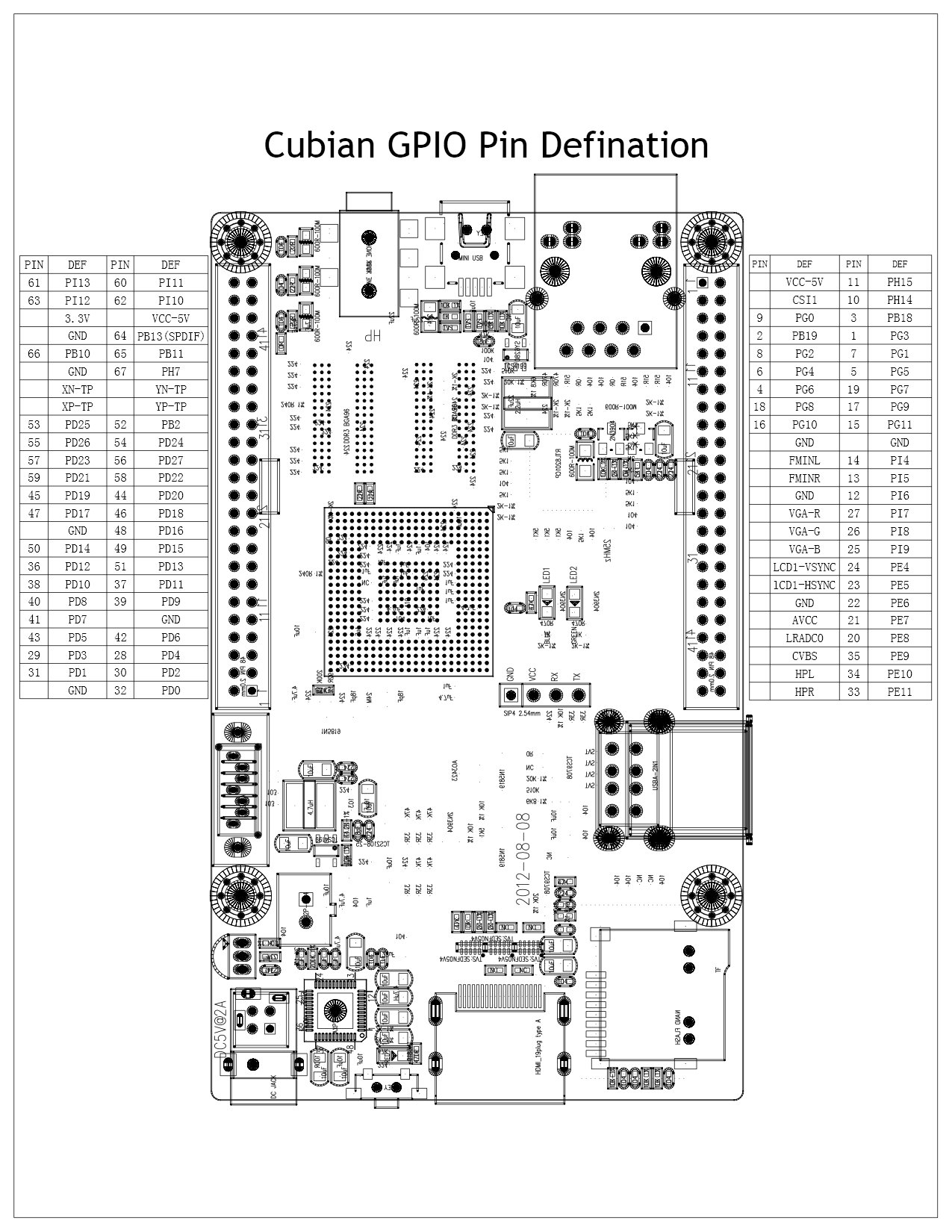
Cubieboard / Cubietruck Debian Wheezy SD card image
Fex Guide – Описание FEX стандарта
/boot/cb2-hdmi.bin # bin2fex cb2-hdmi.bin > cb2-hdmi.txt # fex2bin cb2-hdmi.txt cb2-hdmi.bin
PH20 – Зеленый светодиод на плате.
Все порта должны быть прописаны а также не должны пересекаться. [gpio_para] gpio_used = 1 gpio_num = 3 gpio_pin_1 = port:PH20<1><default><default><1> gpio_pin_2 = port:PH21<1><default><default><1> gpio_pin_3 = port:PD1<1><default><default><1> #cd /sys/class/gpio #ls -al export gpiochip1 -> ../../devices/platform/gpio-sunxi/gpio/gpiochip1 unexport Активация порта PH20. (echo 3 -> для PD1) # echo 1 > /sys/class/gpio/export # ls -al export gpio1_ph20 -> ../../devices/platform/gpio-sunxi/gpio/gpio1_ph20 gpiochip1 -> ../../devices/platform/gpio-sunxi/gpio/gpiochip1 unexport Включаем режим вывода. # echo out > gpio1_ph20/direction Читаем из порта. # cat gpio1_ph20/value 0 Записываем в порт. # echo 1 > gpio1_ph20/value # cat gpio1_ph20/value 1
Проверенно, работает.
http://blog.radiotech.kz/blog/cubieboard/34.html