Архивы автора: admin
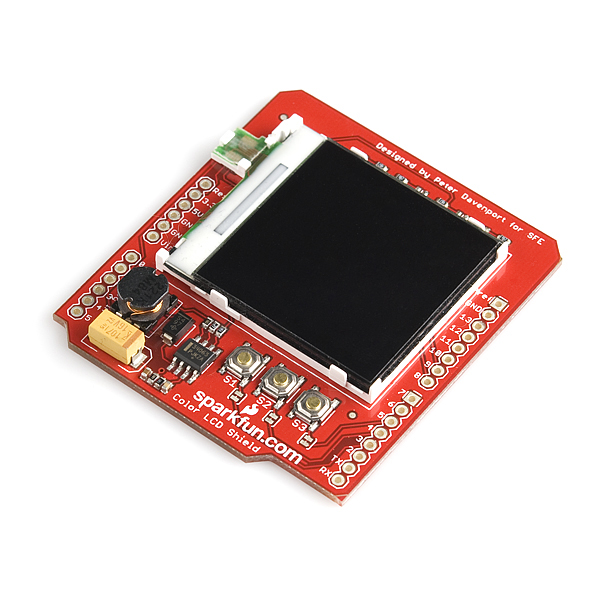
Color LCD Shield
Library for Arduino 1.0.3
LCD_Library
Library for Arduino 1.05
При инициализации экрана необходимы вот эти строчки.
lcd.init(EPSON);
lcd.contrast(44);
ColorLCDShield
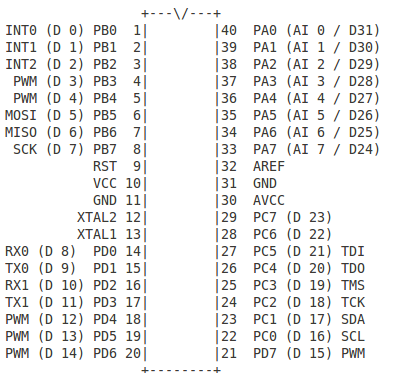
Для AtMega 1284p *.h #else #define LCD_PIN_RES 2 // 26 // D8 #define LCD_PIN_CS 3 // 27 // D9 #define LCD_PIN_DIO 5 // D11 #define LCD_PIN_SCK 7 // D13 #define LCD_PORT_CS PORTA #define LCD_PORT_SCK PORTB #define LCD_PORT_RES PORTA #define LCD_PORT_DIO PORTB #endif И вот это в *.cpp DDRB = ((1<<LCD_PIN_DIO)|(1<<LCD_PIN_SCK)); DDRA = ((1<<LCD_PIN_CS)|(1<<LCD_PIN_RES));
TinyRTC модуль.
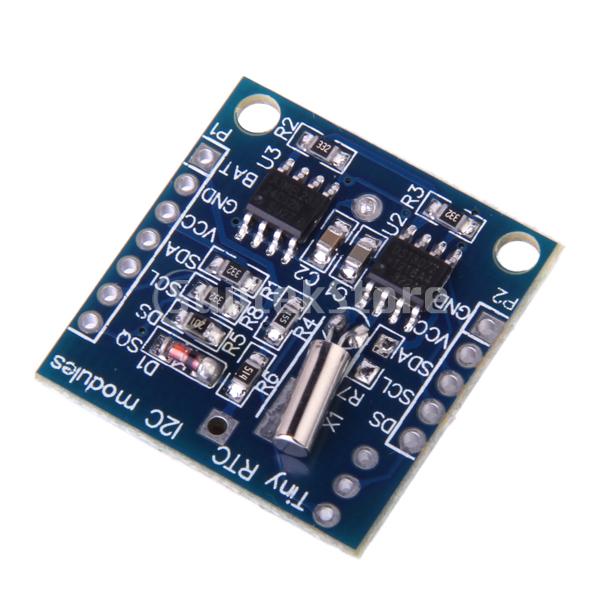
В данном модуле должна быть установлена НЕ БАТАРЕЙКА а аккумулятор LIR2032 3.6v, в противном случаи часы не будут сохраняться после отключения питания. Короче барахло китайское.
Atmega1284P SMD
Разводка платы для проектов: ATMEGA1284P
Как превратить ATmega1284P в Arduino проверенно работает.

Программирование через Arduino ISP
Programming Uno Target board (1284P)
D10 (SS) Reset - pin 9 (green)
D11 (MOSI) Pin 6 (yellow)
D12 (MISO) Pin 7 (orange)
D13 (SCK) Pin 8 (black)
Gnd Gnd (blue)
+5V +5V (red)